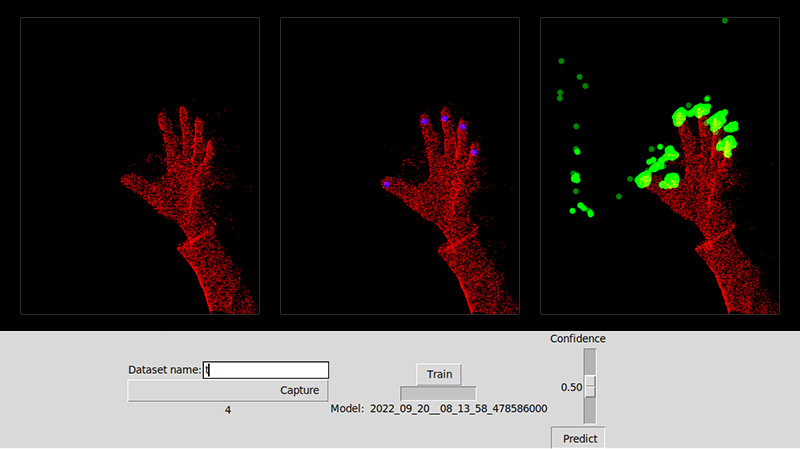
3D 识别器
在实时 3D 点云数据上快速训练和测试您自己的分割模型。该项目包含一个深度学习模型(基于 PyTorch 的 RandLA-Net 实现),能够检测英特尔 RealSense L515 激光雷达摄像头或预录制的点云流中的指尖视频。模型可以在搭载 Docker 容器的 Jetson 上运行。项目用户界面包含三个屏幕:第一个屏幕显示来自点云镜头的实时摄像头输出;第二个屏幕用于捕捉和标记从第一个屏幕中捕捉的快照样本;第三个屏幕则可以在 250 毫秒内使用来自第一个屏幕的实时数据显示模型的预测。底部部分帮助完成使用第二个屏幕的训练,并可动态调整用于实时预测的置信区间。