NVIDIA Isaac 库和 AI 模型
NVIDIA 机器人开发全栈 CUDA 加速库和优化的 AI 模型让您能够以更好、更高效的方式开发、训练、仿真、部署、运营和优化机器人系统。
用于操作的 NVIDIA Isaac


姿态估计和追踪
FoundationPose 是一个基础模型,用于对新物体进行 6D 姿态估计和追踪。它可以跟踪和估计不可见物体的姿态,并且可以处理具有挑战性的物体属性 (无纹理、光滑、微小) 以及快速运动或严重遮挡的场景。
深度估计
FoundationStereo 是一个基础模型,旨在实现立体匹配的强大零样本泛化。
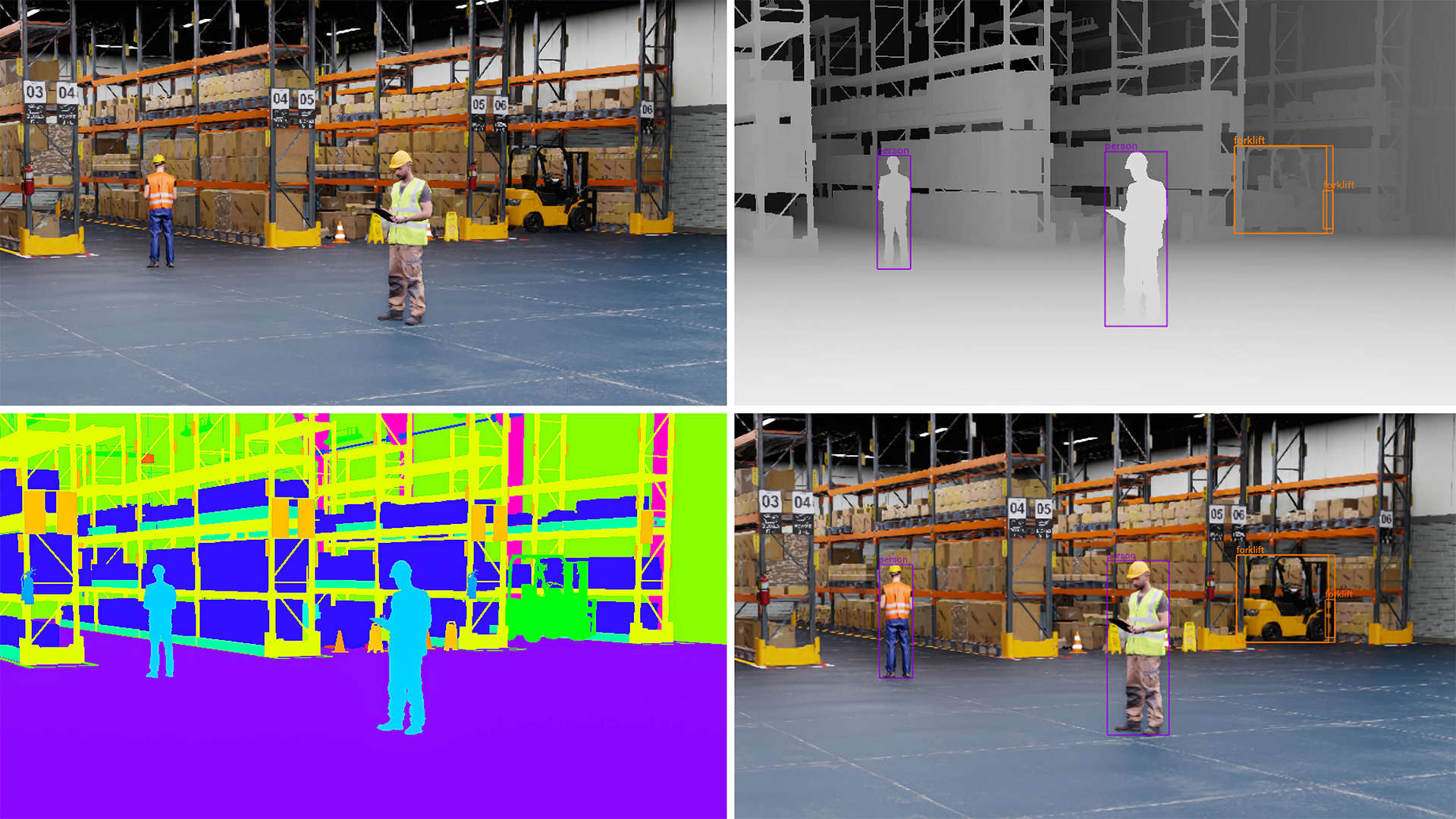
物体检测
SyntheticaDETR 是用于室内环境物体检测的预训练模型。它可用作 FoundationPose 等姿态估计器的前端,因此可以在姿态估计之前使用 2D 边界框定位物体。

Isaac TeleOp
通过现实世界和模拟中的远程操作收集高质量的人类演示。
NVIDIA Isaac 助力出行
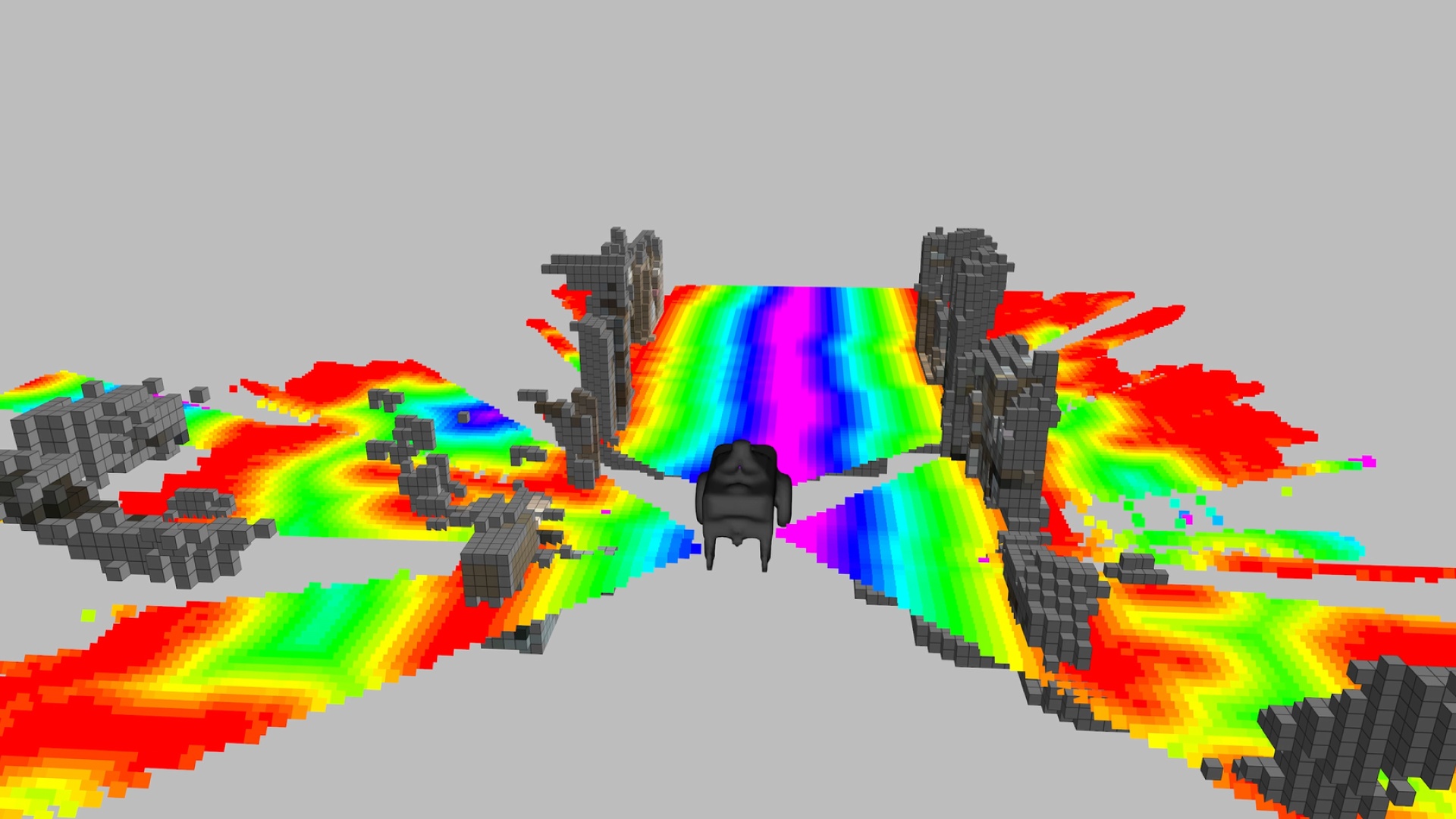
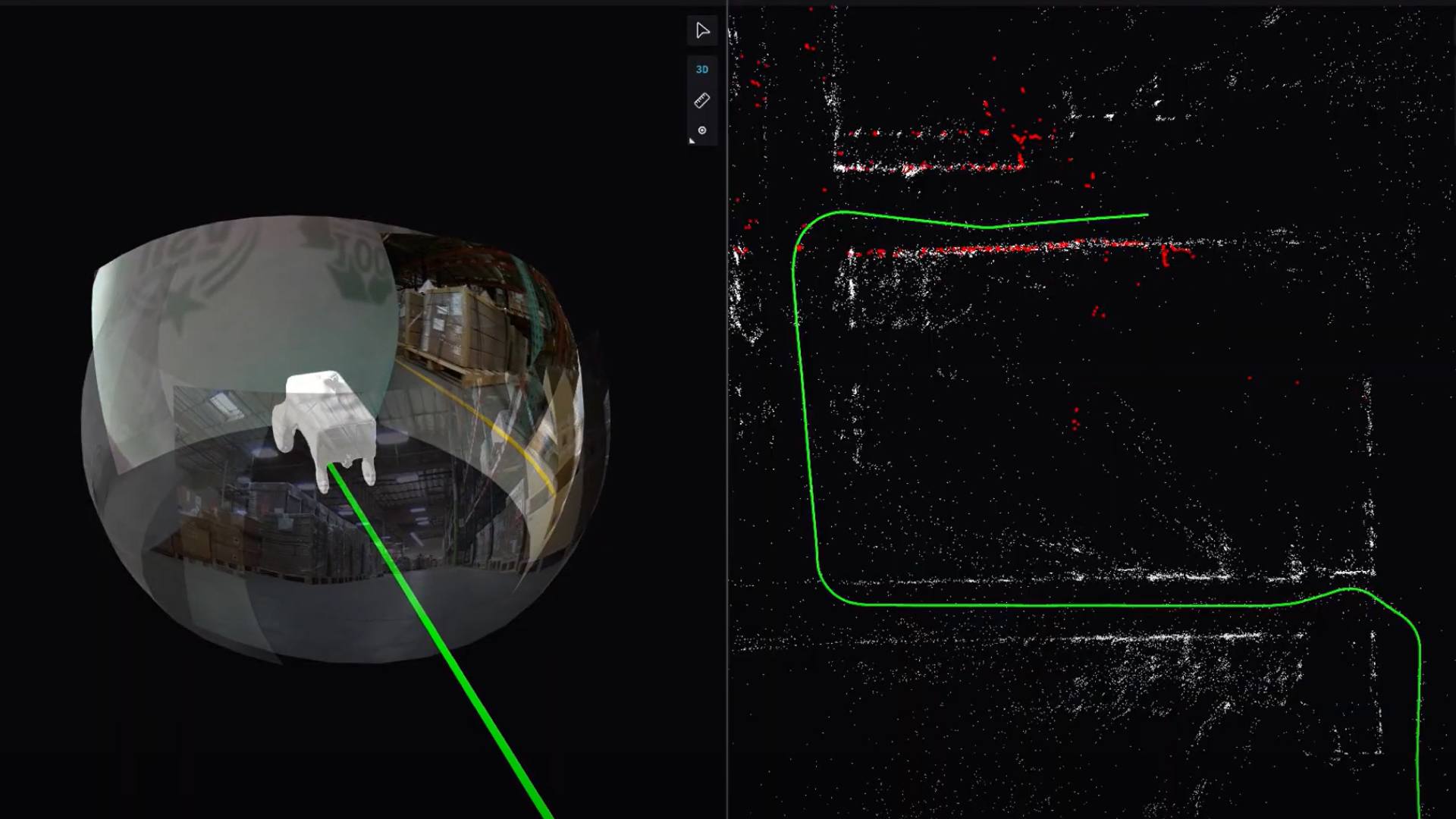
实时 3D 占用率网格
借助 NVIDIA nvblox CUDA 加速的 3D 重建库,机器人能够识别 5 米以外 3D 空间中的障碍物,并生成 2D 成本图。获得结果的速度比以 CPU 为中心的方法快 100 倍。
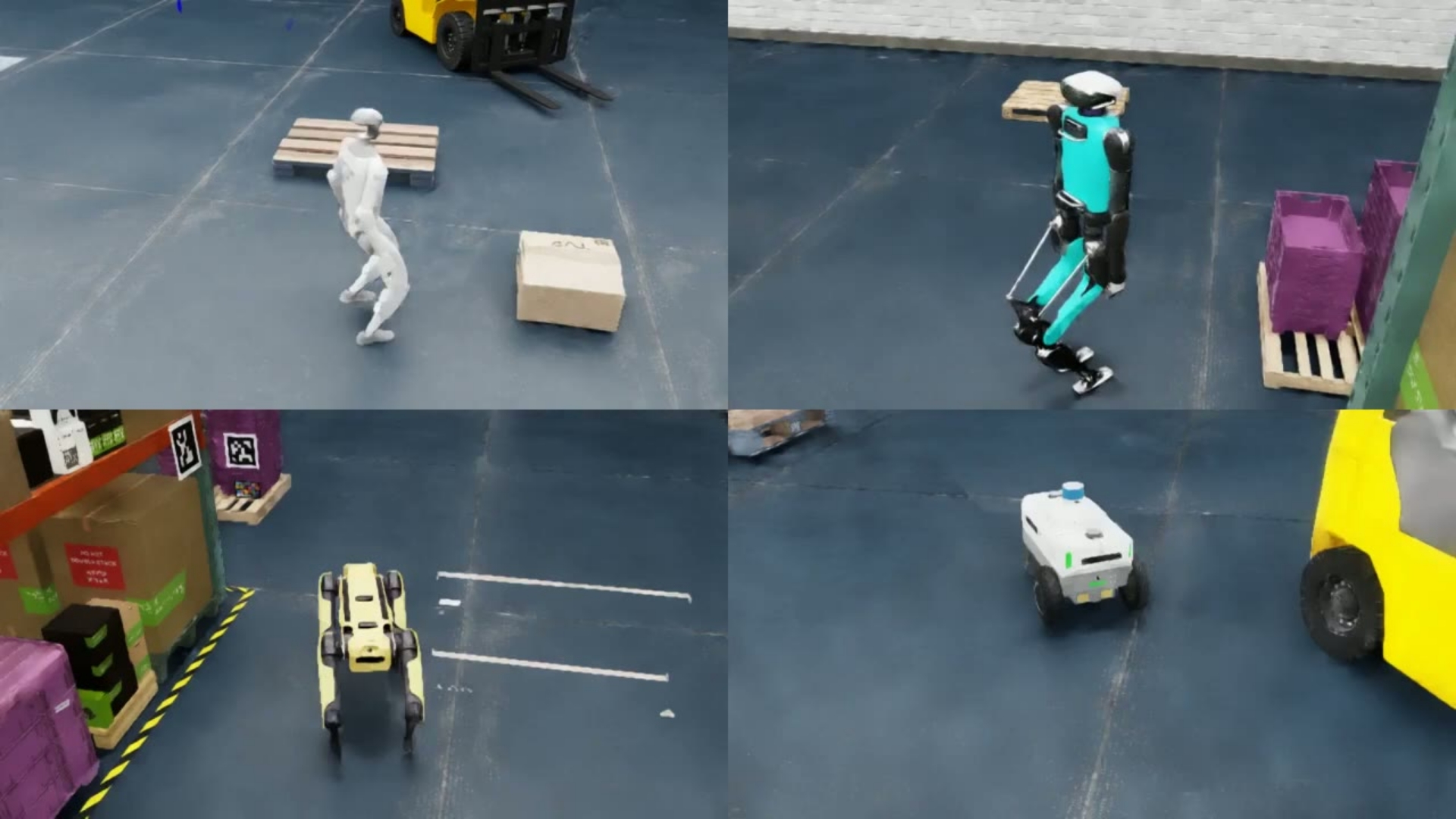
通用的端到端移动性
使用 NVIDIA COMPASS 训练基于视觉的移动性基础模型,实现跨机器人类型和不断变化的环境的导航。
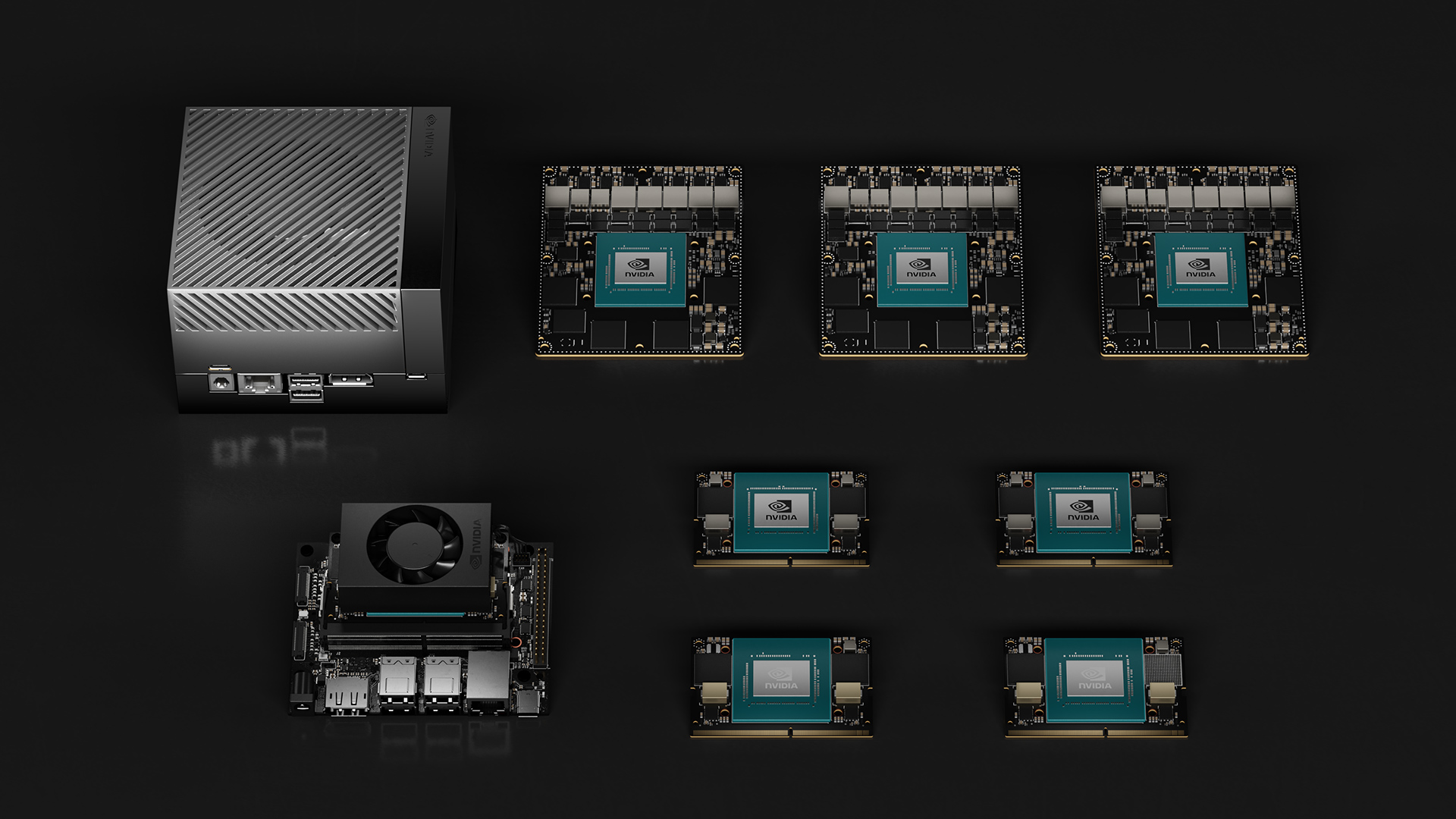
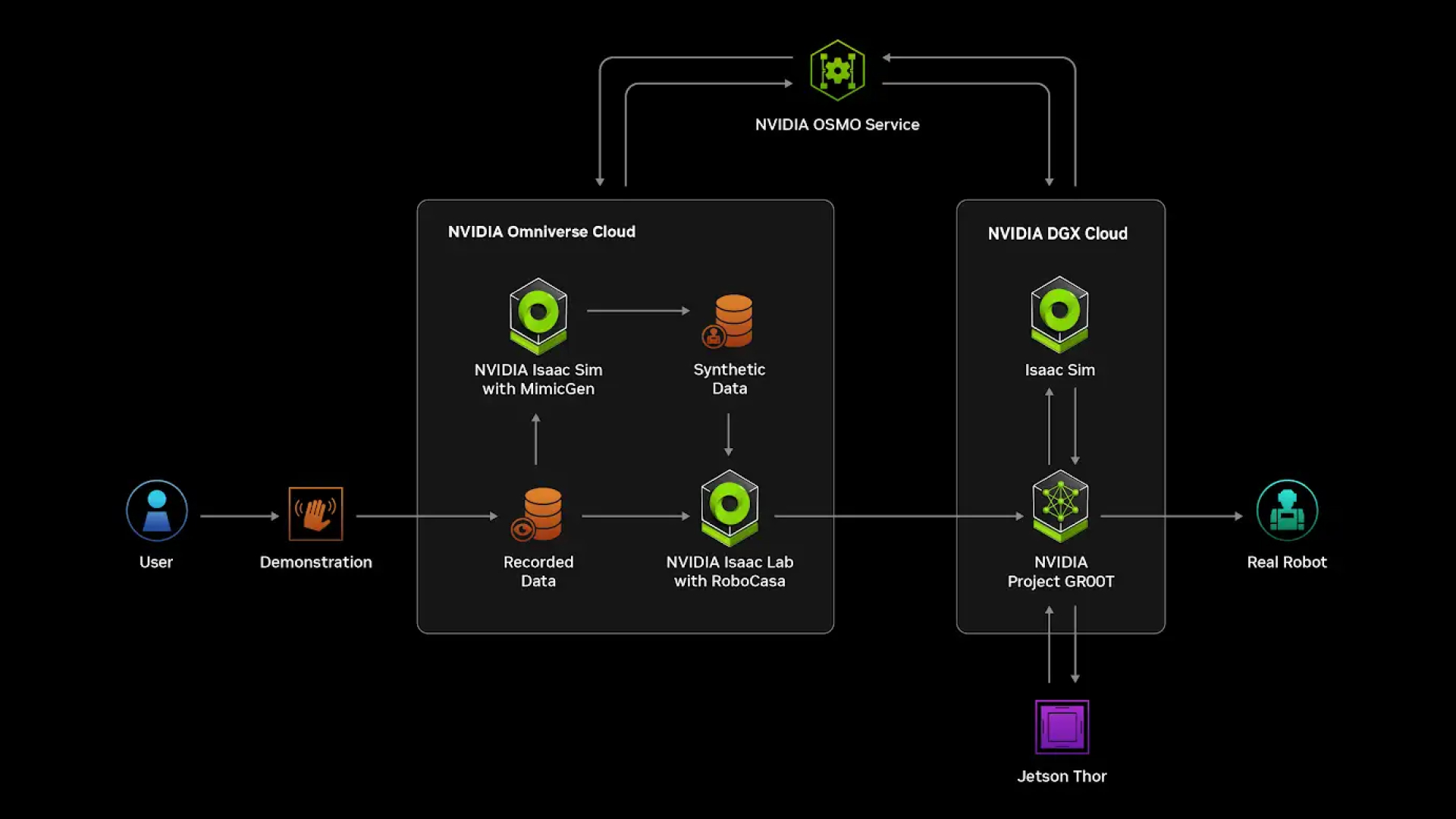
工作流程包括合成数据生成通过 NVIDIA Isaac Sim™ 和 Cosmos™ Transfer,在 Isaac Lab 中进行模型训练和后训练,并使用NVIDIA Jetson Orin™或Thor。
NVIDIA Isaac ROS
NVIDIA Isaac ROS (机器人操作系统) 基于开源 ROS 2 构建。这些 NVIDIA CUDA 加速计算包和 AI 模型的集合简化并加速了先进 AI 机器人应用的开发。
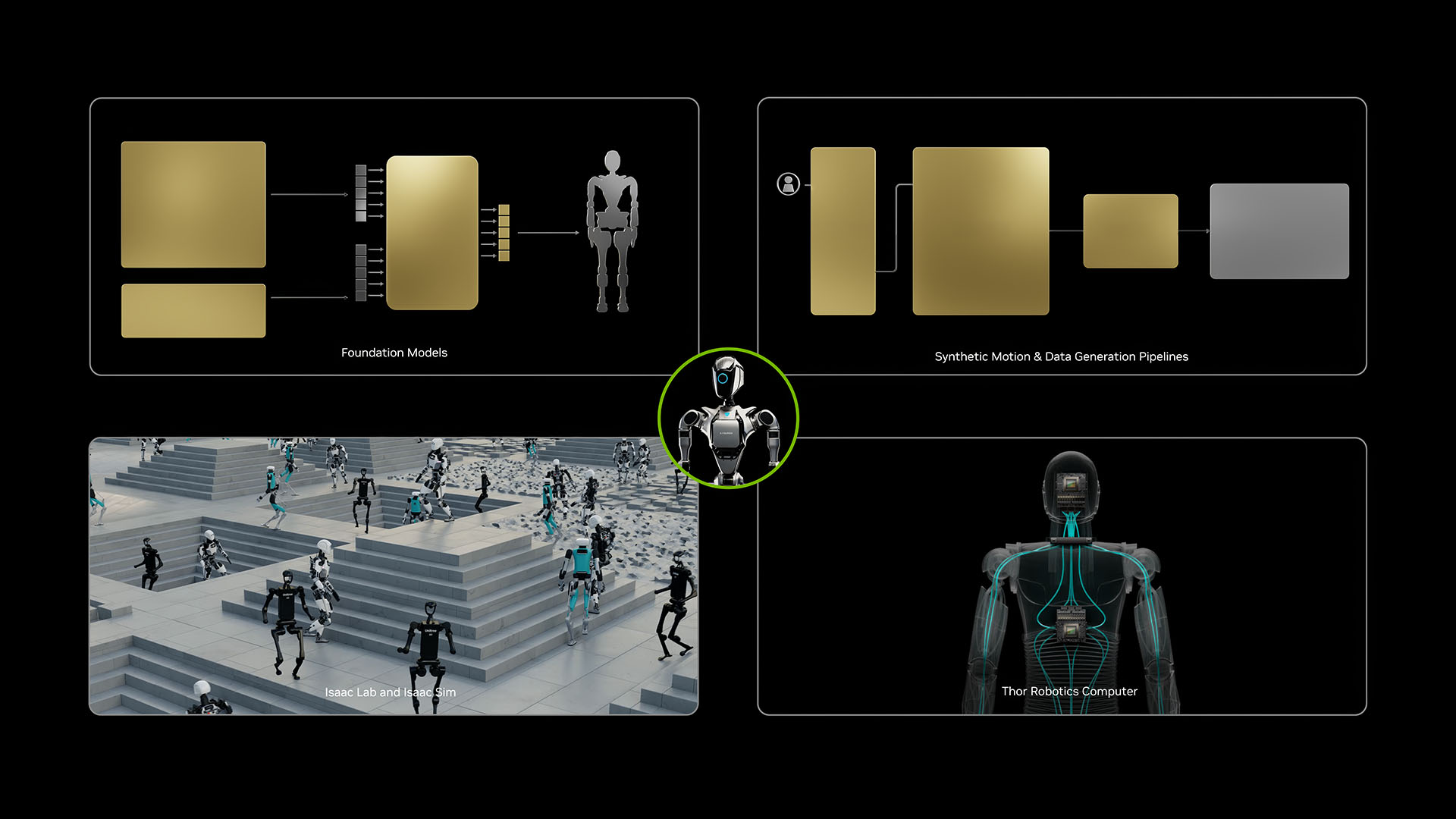
仿真和机器人学习
在基于物理的虚拟环境中设计、仿真、测试和训练基于 AI 的机器人和自主机器。
NVIDIA Isaac Sim
NVIDIA Isaac Sim,基于NVIDIA Omniverse因此,您可以在基于物理性质的虚拟环境中更快地开发自主机器。
一起,NVIDIA Cosmos和 Isaac Sim 可让您从 3D 场景生成合成数据,用于训练感知机器人。

NVIDIA Isaac Lab
此轻量级示例应用基于 Isaac Sim 构建,并针对机器人学习和机器人基础模型训练进行了优化。