DEVELOPER
首页
博客
论坛
论坛 (英文)
文档
下载
培训
搜索
加入
机器人感知
2025年 12月 17日
借助 NVIDIA Isaac Sim 与 World Labs Marble 加速机器人仿真环境构建
一直以来,为机器人仿真构建逼真的 3D 环境是一项非常耗费人力的工作,往往需要数周的手动建模与配置。如今,借助生成式世界模型,
2 MIN READ
借助 NVIDIA Isaac Sim 与 World Labs Marble 加速机器人仿真环境构建
2025年 12月 1日
如何利用 NVIDIA Cosmos Cookbook 拓展物理 AI 数据生成
构建强大的物理AI模型需要大规模、多样化且符合物理规律的可控数据。在现实世界中采集大规模、多样化的数据集用于训练,不仅成本高昂、耗时较长,
4 MIN READ
如何利用 NVIDIA Cosmos Cookbook 拓展物理 AI 数据生成
2025年 11月 25日
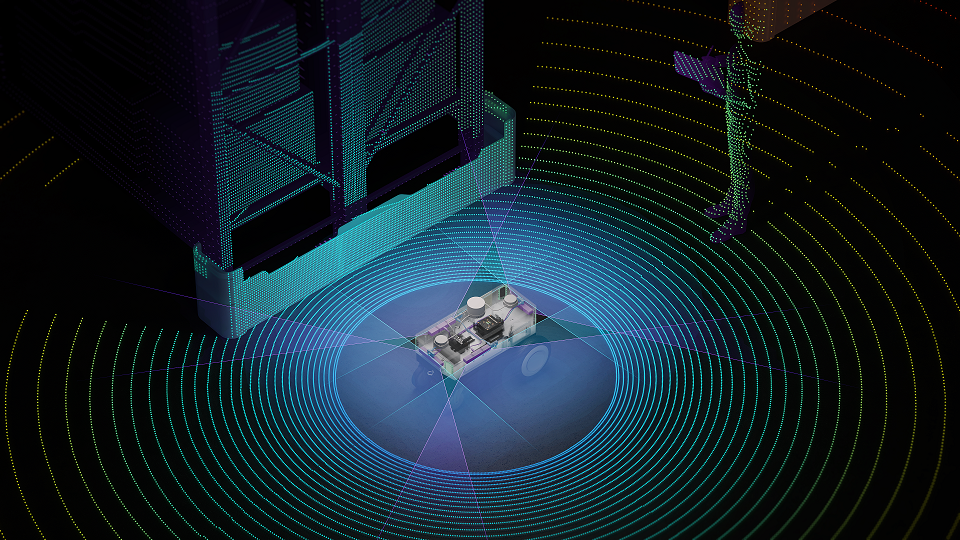
在 NVIDIA Jetson Thor 上提升机器人感知效率
借助 NVIDIA 视觉编程接口库(VPI),您可以更有效地利用 Jetson Thor 的计算性能。
4 MIN READ
在 NVIDIA Jetson Thor 上提升机器人感知效率
2025年 1月 6日
利用最新的 NVIDIA Isaac 版本推进机器人学习、感知和操控技术
在 CES 2025 上,NVIDIA 宣布了对 NVIDIA Isaac 的重要更新。NVIDIA Isaac 是一个由加速库、
3 MIN READ
利用最新的 NVIDIA Isaac 版本推进机器人学习、感知和操控技术
2024年 6月 2日
使用新的 NVIDIA Isaac 基础模型和工作流程创建、设计和部署机器人应用
机器人在智能制造设施、商业厨房、医院、仓库物流和农业领域等不同环境中的应用正在迅速扩展。该行业正在向智能自动化转变,
3 MIN READ
使用新的 NVIDIA Isaac 基础模型和工作流程创建、设计和部署机器人应用
2024年 1月 18日
使用 NVIDIA Isaac ROS 为深度物体姿态估计训练生成合成数据
机器人智能体要与环境中的物体进行交互,必须了解周围物体的位置和方向。此信息描述了 3D 空间中刚体的六自由度 (DOF) 姿态,
3 MIN READ
使用 NVIDIA Isaac ROS 为深度物体姿态估计训练生成合成数据
2023年 11月 17日
使用适用于 ROS 的 NVIDIA Isaac Transport 提升自定义 ROS 图形
适用于 ROS 的 NVIDIA Isaac Transport(NITROS)是在 ROS 2 Humble 中引入的两种硬件加速功能…
4 MIN READ
使用适用于 ROS 的 NVIDIA Isaac Transport 提升自定义 ROS 图形
2023年 11月 13日
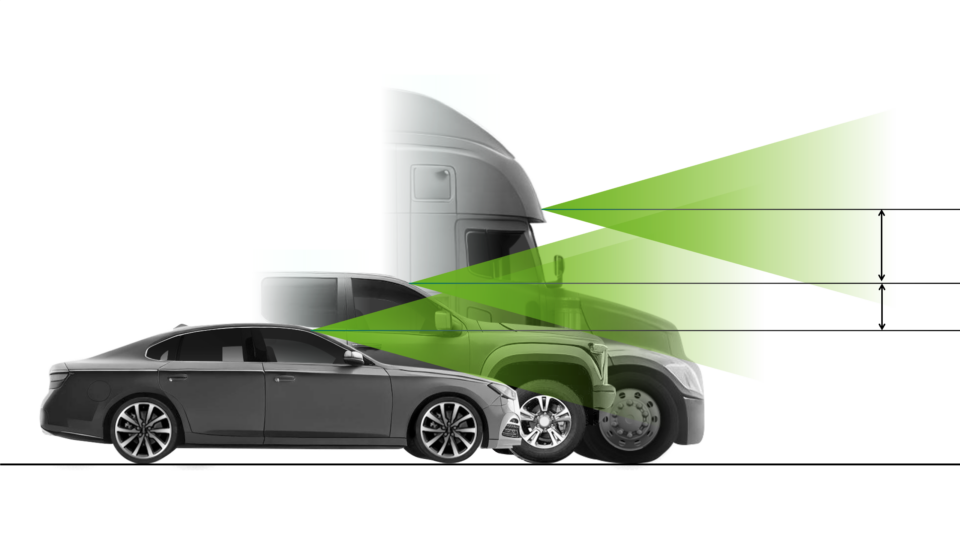
使用合成数据处理自动驾驶汽车感知
自动驾驶汽车 (AV) 有各种形状和大小,从小型客车到多轴半挂卡车不等。但是,部署在这些车辆上的感知算法必须经过训练,以处理类似情况,
2 MIN READ
使用合成数据处理自动驾驶汽车感知
2023年 10月 18日
借助 NVIDIA Isaac 平台上的高级模拟和感知工具加速 AI 机器人开发
NVIDIA 于今日在 ROSCon 2023 发布了对 NVIDIA Isaac Robotics 平台的重大更新。
2 MIN READ
借助 NVIDIA Isaac 平台上的高级模拟和感知工具加速 AI 机器人开发
2023年 9月 12日
为 NVIDIA Jetson 和其他嵌入式系统选择合适的摄像头
在基于人工智能的嵌入式系统中,摄像头模块是最不可或缺的部分。市场上有众多的相机模块可供选择,这可能会让选择过程变得困难。
2 MIN READ
为 NVIDIA Jetson 和其他嵌入式系统选择合适的摄像头
加载更多