教程
我们的教育资源专为实际操作和动手体验而设计,帮助开发者快速掌握 Jetson 平台的使用方法。依托内设专家的逐步教学视频,无需复杂步骤,即可轻松启动开发流程,实现高效学习与应用。

立即开始您的 AI 学习
NVIDIA 深度学习培训中心 (DLI) 为开发者、教育工作者、学生和终身学习者提供边缘 AI 方面的实用实战培训和认证。这是获取您在职业生涯中蓬勃发展和进步所需的关键 AI 技能的好方法。完成这些免费的开源课程后,您甚至可以获得证书,证明您对 Jetson 和 AI 的理解。 立即注册 >

Jetson 生成式 AI 实验室
Jetson 生成式 AI 实验室是将生成式 AI 推向世界的门户。探索有关文本生成、文本+ 视觉模型、图像生成和蒸馏技术的教程。访问在 NVIDIA Jetson Orin 上运行这些模型的资源。借助视觉 LLM 和最新的一次性 ViT,体验实时性能。在本地部署颠覆性功能。加入生成式 AI 革命,立即开始。 立即试用 >
两天快速上手项目 (Two Days to a Demo)
Two Days to a Demo 是我们的入门级深度学习教程系列,用于使用 NVIDIA Jetson 在现场部署 AI 和计算机视觉。

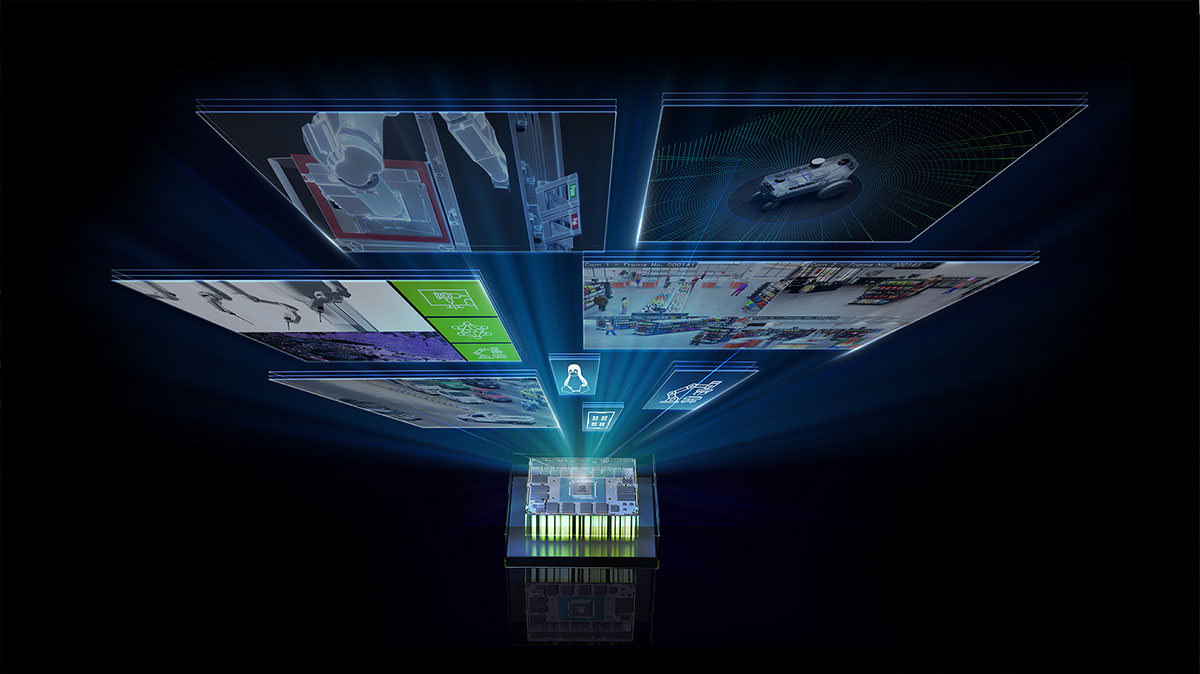
Jetson 上的 Metropolis API 和微服务
了解 NVIDIA Metropolis API 和微服务如何在 Jetson Orin 上加速您的边缘视觉 AI 应用。构建边缘视觉 AI 应用通常需要漫长且成本高昂的开发周期。一系列功能强大的全新 Metropolis API 和微服务可帮助您将在 Jetson 上开发和部署视觉 AI 的时间从几年缩短到几个月。

JetPack 4.6 深度解析和演示
深入了解 JetPack™ 4.6 中包含的功能,包括精选功能的演示。NVIDIA® Jetson™ 专家也将参与问答环节,解答您的问题。JetPack SDK 为所有 Jetson 模组和开发者套件提供支持,使开发者能够开发和部署端到端加速的 AI 应用。JetPack 4.6 是最新的正式版本,包含基于镜像的无线更新、A/ B 根文件系统冗余、用于刷写连接到 Jetson 的内部或外部存储的新刷写工具,以及 NVIDIA GPU Cloud (NGC) 上用于 Jetson 的新计算容器等重要功能。

使用 VPI 1.1 加速计算机视觉和图像处理
VPI 是 Jetson 上运行速度最快的计算机视觉和图像处理库,现已添加对 Python 的支持。使用 VPI 算法加速您的 OpenCV 实施,从而在 CPU 和 GPU 上实现显著加速。欢迎了解如何使用 VPI 编写高性能视觉管线。我们将介绍 JetPack 4.6 中包含的 VPI-1.1 中的所有新算法,并重点介绍最近添加的 Python 绑定开发者预览。了解此新库如何帮助您轻松高效地使用 Jetson 系列设备和 NVIDIA dGPU 的计算能力。

使用 Sequitur Labs Emspark 安全套件保护边缘 AI
随着边缘 AI 和机器学习模型的加速部署,物联网设备安全性至关重要。设备级别的安全性需要了解芯片、加密和应用设计。了解如何在 Jetson 平台上实施物联网安全,涵盖可信设备的关键元素、如何设计、构建和维护安全设备、如何使用 EmSPARK 安全套件在网络边缘保护 AI/ ML 模型以及生命周期管理。

NVIDIA JetPack 4.5 概述和功能演示
使用 JetPack SDK 4.5 (支持所有 Jetson 模组和开发者套件的最新生产版本) 在 Jetson 上开发具有端到端加速的高性能 AI 应用。此版本具有增强的安全启动、新的 Jetson Nano 引导加载程序以及使用 NFS 刷写 Jetson 设备的新方式。它还包含 VPI (硬件加速的视觉编程接口) 的首个产品版本。全面了解 JetPack 4.5 中的新功能,并观看精选功能的实时演示。我们的 Jetson 专家在问答中回答了问题。

使用 VPI 实施计算机视觉和图像处理解决方案
全面了解 VPI API。您将学习如何使用在 Jetson 系列设备上运行的 VPI 构建完整高效的立体差异估计工作流。VPI 为 CPU 和 NVIDIA CUDA 算法实现提供统一的 API,以及 VPI 与 OpenCV 和 CUDA 之间的互操作性。

使用 NVIDIA 预训练模型和 TAO 工具套件 3.0 与机器人创建基于手势的交互
使用 NVIDIA TAO 工具套件 3.0 和预训练模型训练基于深度学习的交互式手势识别应用。我们将演示端到端开发者工作流程;获取预训练模型,使用您自己的数据对其进行微调,并展示在 Jetson 上部署模型的轻松程度。构建手势识别应用,并将其部署到机器人上,以便与人类交互。借助 NVIDIA AI takit,您可以轻松缩短从概念到生产的总开发时间。

借助 alwaysAI 加速 NVIDIA Jetson 上计算机视觉的 AI 开发
了解如何使用最少编码的 alwaysAI 开发基于 AI 的计算机视觉应用,并在 Jetson 上进行部署,以在零售、机器人、智慧城市、制造业等应用中实现实时性能。借助 AlwaysAI 工具,没有 AI 经验的开发者可以轻松地快速开发和扩展应用。观看在 Jetson Nano、Jetson TX2 和 Jetson Xavier NX 上运行物体检测和语义分割算法的演示。

开始使用适用于 Jetson 的全新 PowerEstimator 工具
此网络会议将介绍 Jetson 功率模式定义,并带观众了解演示用例,展示在 Jetson Xavier NX 上创建和使用自定义功率模式的情况。

Jetson Xavier NX 开发者套件:边缘计算领域的下一次飞跃
JetPack 是构建 AI 应用的全面解决方案,包括最新的操作系统镜像、库和 API、示例、开发者工具和文档,所有这些都是加速 AI 应用开发所需的。此网络会议可让您深入了解 JetPack,包括实时演示 JetPack 4.3 (适用于所有 Jetson 模组的最新生产软件版本) 中的关键新功能。

Isaac Sim 2020 深度解析
加入我们,深入探索 Isaac Sim 2020:NVIDIA 机器人模拟器的最新版本。Isaac Sim 于 2019 年首次发布基于虚幻引擎,自那时起,开发团队一直在努力使用 NVIDIA 的 Omniverse 平台构建全新的机器人仿真解决方案。

为 Jetson Nano 设计产品
了解如何将 Jetson Nano 系统模组有效集成到您的产品中。我们将解释 NVIDIA 工程师如何使用 Jetson Nano 平台进行设计。主题包括功能选择、设计权衡,以及电气、机械、散热注意事项等。我们还将深入探讨 Jetson Nano 开发者套件的创建,以及如何利用我们的设计资源。

为 Jetson 开发实时神经网络
探索为 NVIDIA Jetson 开发实时神经网络应用程序的技术。我们将介绍使用 PyTorch 和 TensorFlow 框架设计的用于分析和优化神经网络的各种工作流。此外,我们还将讨论在设计考虑实时部署的神经网络时需要考虑的实际限制。如果您熟悉深度学习,但不熟悉 NVIDIA 提供的优化工具,此会议适合您。

NVIDIA Jetson:大规模实现 AI 驱动的自主机器
了解用于在机器人、视频分析、医疗健康、工业自动化、零售等领域部署边缘 AI 的 NVIDIA Jetson 平台。了解 Jetson 系列的关键硬件功能、实现从开发到部署无缝衔接的统一软件堆栈,以及有助于快速上市的生态系统。最后,我们将介绍合作伙伴发布的新产品公告、路线图和成功案例。

用于训练、构建和部署边缘智能视觉应用的 NVIDIA 工具
了解如何理解从传感器、摄像头和其他物联网设备中提取的数据。了解如何使用海量数据集进行训练并进行实时部署,以创建高吞吐量、低延迟的端到端视频分析工作流。我们将向您展示如何优化训练工作流程,使用预训练模型构建智能停车、基础设施监控、救灾、零售分析或物流等应用。了解用于创建、构建和部署视频应用的工具套件,这些应用将收集见解并提高业务效率。

使用 Deepstream 进行构建,使用 AWS IoT 服务进行部署和管理
此网络会议将带您了解 DeepStream SDK 软件堆栈、架构,以及如何使用自定义插件来帮助与云或分析服务器进行通信。它还将概述工作流,并展示 AWS IoT Greengrass 如何帮助将 DeepStream 应用和机器学习模型部署和管理到 Jetson 模块,以及如何更新和监控从 AWS 云到 NVIDIA Jetson Nano 的 DeepStream 示例应用。

Jetson Xavier NX 为边缘 AI 设备带来云原生敏捷性
AI 边缘设备上的云原生技术是未来的发展方向。了解 NVIDIA Jetson 如何将云原生转型引入 AI 边缘设备。我们将展示一个深度演示,展示 Jetson 同时运行多个容器化应用和 AI 模型的能力。加入我们,了解如何构建容器并在 Jetson 上进行部署;深入了解微服务架构、容器化和编排如何使云应用程序摆脱单一软件工作流的限制;详细概述 Jetson 系列提供的最新功能,包括边缘云原生集成。

JetPack SDK – 在 Jetson 平台上加速自主机器开发
JetPack 是构建 AI 应用的全面解决方案。它包括最新的操作系统镜像,以及库和 API、示例、开发者工具和文档,所有这些都是加速 AI 应用开发所需的。此网络会议可让您深入了解 JetPack,包括实时演示 JetPack 4.3 (适用于所有 Jetson 模组的最新生产软件版本) 中的关键新功能。

Jetson Nano 上 10 行 Python 代码中的实时物体检测
在本实战教程中,您将学习如何:
- 安装必备库并下载基于 90 类 MS-COCO 数据集进行预训练的 DNN 模型 (例如 SSD-Mobilenet 和 SSD-Inception) ,即可设置您的 NVIDIA Jetson Nano 和编码环境
- 使用 NVIDIA TensorRT 运行多个物体检测示例
- 通过实时摄像头馈送,使用 Python 编写您自己的实时物体检测程序。

DeepStream 与 Azure IoT 的边缘到云集成
了解 DeepStream SDK 如何通过简化分析、智能交通控制、自动光学检测、物体追踪和网页内容过滤等应用来加速灾难响应。该应用框架具有硬件加速构建块,可将深度神经网络和其他复杂的处理任务引入流处理工作流。
DeepStream:用于改进视频分析的 SDK
DeepStream SDK 是一个完整的流分析工具包,可通过计算机视觉、智能视频分析 (IVA) 和多传感器处理实现态势感知。该应用程序框架具有硬件加速的构建块,可将深度神经网络和其他复杂的处理任务引入流处理工作流。学习加速分析、智能交通控制、自动光学检测、物体追踪和网页内容过滤等应用。

DeepStream SDK – 加速基于 AI 的实时视频和图像分析
使用 DeepStream SDK 克服在开发用于大规模视频理解的流分析应用时面临的巨大挑战。此技术网络会议让您更深入地了解 DeepStream 4.0,包括在边缘实现更出色的 AI 推理性能。

在 Jetson Nano 上使用 AWS ML IOT 服务部署 AI
了解如何使用 AWS ML 服务和 AWS IoT Greengrass 开发深度学习模型,并借助 NVIDIA Jetson Nano 在边缘进行部署。创建示例深度学习模型,在 Jetson Nano 上设置 AWS IoT Greengrass,并使用 AWS IoT Greengrass 在 Jetson Nano 上部署示例模型。

Hello AI World - 了解 Jetson Nano
详细了解 Jetson Nano 背后的硬件和软件。了解如何创建和部署自己的深度学习模型,以及构建由 AI 驱动的自主机器人和智能设备。

面向创客的 AI - 通过 JetBot 学习
想要借助 AI 将您的下一个项目提升到全新水平?JetBot 是一款开源 DIY 机器人套件,展示了使用 Jetson Nano 构建新 AI 项目的轻松程度。

Isaac ROS 网络研讨会系列
NVIDIA Isaac™ 机器人操作系统 (ROS) 是一系列硬件加速软件包,可让 ROS 开发者更轻松地在 NVIDIA 硬件上构建高性能解决方案。在本系列中,我们将介绍各种主题,例如 Pinpoint、250fps、在 Jetson 上使用 vSLAM 进行 ROS 2 定位、在 ROS 中加速 YOLOv5 和自定义 AI 模型、在 DevOps 中设计持续集成以及

使用 NVIDIA 的 DeepStream 和 TAO 工具套件大规模部署流分析
了解用于克服在开发用于大规模视频理解的流分析应用时面临的最大挑战的新工具。NVIDIA 的 DeepStream SDK 框架使开发者能够专注于核心深度学习网络和 IP …。

Jetson AGX Xavier 和自主机器的新时代
了解 Jetson AGX Xavier 架构,以及如何开始使用 Jetson AGX Xavier 开发者套件和 JetPack SDK 开发尖端应用程序。您还将探索机器人和智能设备自主性的新进展。

利用 NVIDIA Jetson 在机器人开发中进行深度强化学习
观看此 NVIDIA Jetson 在线研讨会,了解如何为机器人开发自主强化学习智能体。了解深度强化学习中用于实现灵活任务和行为 (例如机器人中的拾放和路径规划) 的现代方法。

为 NVIDIA Jetson 加速 TensorFlow 模型
TensorFlow 模型库为训练图像分类和物体检测模型提供了简化程序。在本教程中,我们将讨论 TensorFlow 中的 TensorRT 集成,以及如何将其用于加速来自 TensorFlow 模型库的模型,以便在 NVIDIA Jetson 上使用。

Jetson 上的 TensorFlow 到 TensorRT
NVIDIA GPU 现已成为深度学习训练的首选平台。本白皮书将探讨 GeForce Titan X 和 Tegra TX1 SoC 上的深度学习推理。结果表明,GPU … …。

与 IBM 一起开发和部署边缘深度学习服务
IBM 的边缘解决方案使开发者能够在许多 Linux 边缘设备 (包括 Jetson TX2 等支持 GPU 的平台) 上安全、自主地部署深度学习服务。借助 JetPack 3.2 的 Docker 支持,开发者可以轻松构建、测试和部署复杂的认知服务,并可通过 GPU 访问视觉和音频推理、分析和其他深度学习服务。

使用 Jetson 构建先进的多摄像头产品
NVIDIA Jetson 是速度超快的边缘 AI 计算平台。凭借强大的成像功能,它可以捕获多达 6 张图像,并提供智能视频分析 (IVA) 的实时处理。除了为帧同步多图像等其他高级解决方案提供图像调优服务之外,了解我们的摄像头合作伙伴如何提供产品开发支持。



使用 NVIDIA Jetson 的嵌入式深度学习
观看此免费在线研讨会,开始使用 NVIDIA 的深度学习工具 (包括 TensorRT 和 DIGITS) 开发具有先进 AI 和计算机视觉的应用。

使用 NVIDIA Jetson 构建更好的自主机器
观看此免费在线研讨会,了解如何使用 Jetson 进行产品原型设计、研究和开发。Jetson 平台可实现高性能计算机视觉、神经网络、成像外设和完整自主系统的快速原型设计和实验。

借助 AI 突破机器人开发和边缘计算的新前沿
观看 NVIDIA 自主机器团队的 GPGPU 开发者和系统架构师 Dustin Franklin 在此在线研讨会录像中介绍在边缘部署高级 AI 的最新工具和技术。了解机器人和深度学习领域的最新发展。



第 0 集:OpenCV 简介
学习使用 OpenCV 在 Jetson 上编写首个“Hello World”程序。首次构建时,您将学习使用 Midnight Commander、cmake 和 OpenCV4Tegra 的 Mat 库构建简单的编译流程。


第 2 集:多媒体 I/ O
学习处理各种来源的图像:JPG 和 PNG 文件以及 USB 网络摄像头。运行 Sobel 等标准过滤器,然后学习显示并输出回文件。实施基本的视频播放机制,以处理和保存连续帧。

第 3 集:基本操作
从应用开始,将图像显示为垫子对象,然后调整大小、旋转它或检测“漂亮”的边缘,然后显示结果。然后,要忽略图像的高频边缘,请对图像进行模糊处理,然后再次运行边缘检测器。当窗口尺寸增大时,羽毛边缘会消失,只留下输入图像中较为显著的边缘。

第 4 集:特征检测和光流
获取输入的 MP4 视频文件 (车辆穿越金门大桥的视频片段) ,并检测一系列连续帧中的角落,然后在已识别的特征周围绘制小标记圈。观看这些标记特征在逐帧中的追踪过程。然后,根据特征标记帧与帧之间的移动距离,对其进行着色。这种简单的分析可以将远离摄像头 (移动较少) 的点划分为这样的点。

第 5 集:描述符匹配和目标检测
使用特征和描述符追踪汽车在第一帧中从一帧移动到另一帧的情况。将 (ORB) 描述符存储在 Mat 中,并在视频播放时将特征与参考图像的特征相匹配。学习使用 RANSAC 算法过滤掉不相干的匹配项。然后,将点与单相矩阵相乘,以在识别出的物体周围创建边界框。结果并不完美,但尝试不同的过滤技术并应用光流来改进样本实现。熟练掌握计算机视觉需要同时进行参数调整和实验。

第 6 集:面部检测
使用级联分类器检测图像中的物体。实现高维函数并存储评估的参数,以便使用预 fab HAAR 分类器检测人脸。然后,为避免误报,应用归一化函数并重试检测器。OpenCV 在线文档讨论了分类器实验和创建您自己的一组评估参数。
第 7 集:使用 Hough Transform 检测简单形状
使用 Hough 变换检测视频流中的线条和圆圈。调用 canny-edge 检测器,然后使用 HoughLines 函数尝试输出图像上的各个点,以检测线段和闭环。这些线条和圆圈以向量形式返回,然后在输入图像上绘制。调整圆圈检测器的参数以避免误报;首先应用高斯模糊,类似于第 3 部分中的步骤。

第 8 集:单目摄像头校准
了解如何校准摄像头以消除径向失真,从而实现准确的计算机视觉和视觉测距。使用针孔相机的概念,对大多数廉价消费级相机进行建模。将多张图像与棋盘图案结合使用,检测校正图案的特征,并存储图案的边角。使用一系列图像,设置世界空间和图像空间之间的非线性关系变量。最后,应用旋转、平移和失真系数来修改输入图像,使输入摄像头输入图像与针孔摄像头模型相匹配,误差像素小于 1。最后,查看准确的单目校准提示。