模拟在科学和工程的各个领域都很普遍,但它们通常有一些限制,例如计算时间长、计算资源有限、繁琐的手动设置工作以及对技术专业知识的需求。神经网络不仅加速了传统求解器的仿真,而且简化了仿真设置,解决了传统求解器无法解决的问题。
NVIDIA SimNet 是一个物理信息神经网络( PINN )工具包,面向工程师、科学家、学生和研究人员,他们正在开始使用人工智能驱动的物理模拟。您可能还希望利用一个强大的现有框架来实现您的领域知识,并通过实际应用解决复杂的非线性物理问题。
SimNet 今天应用的一个成功案例是在预后和健康管理中使用数字双胞胎的混合 PINNs 。这项努力是由中佛罗里达大学助理教授 Felipe Viana 教授领导的。他领导团队研究最先进的概率方法,将基于物理的领域知识、多学科分析和优化与设计、诊断和预测应用相结合。
飞机使用案例研究
工程资产和工业设备(如飞机、喷气发动机、风力涡轮机等)的维护对于这些资产的服务和担保的安全性以及提高盈利能力至关重要。有效的预防性维护需要了解各种操作参数及其对设备磨损的影响。仿真、高级分析和深度学习算法能够对复杂系统及其操作环境进行预测建模。
不幸的是,在大型车队中建立估计此类设备剩余使用寿命的模型是令人望而生畏的。这是由于占空比变化、恶劣环境、维护不足和批量生产问题等因素造成的,这些因素会导致设计和观察到的部件寿命之间存在差异。
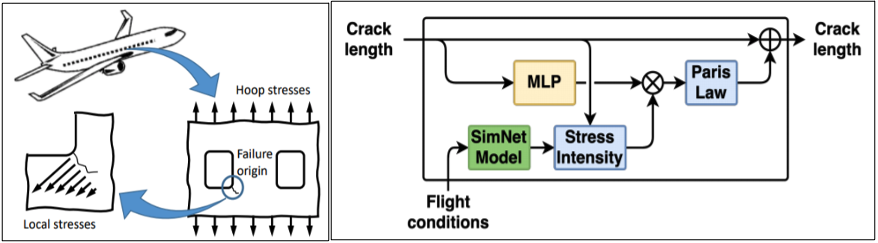
在这个研究项目中, Viana 教授和他的研究团队建立了飞机窗面板疲劳裂纹扩展预测模型(图 1 ),模型使用历史飞行记录(始发机场和目的地机场、巡航高度等)和有限的检查观察进行训练(例如,仅一部分车队的裂缝长度数据,等等)。当建立和验证该模型时,将其应用于 500 架飞机的机队中,以在更大的数据集上分析该模型的成功。此类预测模型也称为数字孪生模型,它们已越来越多地用于工业设备的预测和健康管理应用。
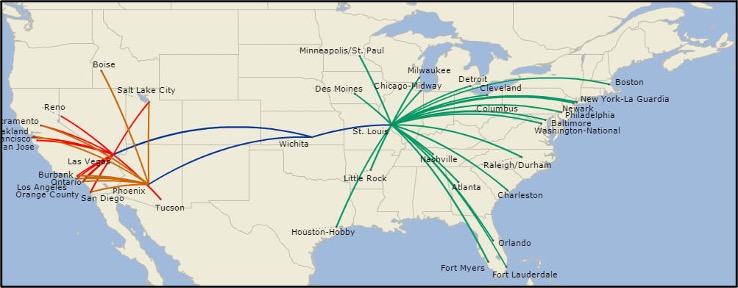
根据文献和免费提供的数据,创建了 500 架窄体飞机代表机队的合成数据。车队平均分为 10 个路线结构(图 2 )。每架飞机平均每天飞行五次。
运行四年后,车队开始接受检查。在这一点上,考虑一种情况,在检查 25 架飞机后,操作者发现在给定窗口的拐角处有一些疲劳裂纹。这些裂缝恰好比预期的要大。从科学的角度来看,这带来了以下挑战:如果预测是由于模型假设而错误的,有没有办法纠正?
其商业含义是直截了当的。当观察到这种差异时,操作员必须决定下一步检查哪架飞机。
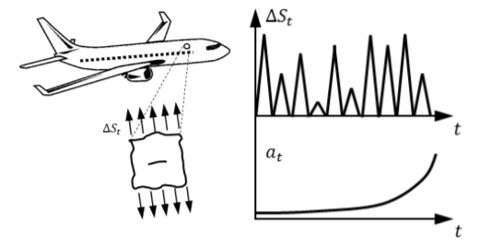
假设您已从机队获得过去四年的飞行数据。控制疲劳裂纹扩展的环向应力是飞机座舱压差的函数,它是巡航高度的函数。纯物理模型假设局部几何校正系数 F = 1 . 122 。实际上,这最终是裂纹长度的函数。除计算效率外,该部件的数字孪生必须具有预测性和飞机特定性。
有两个主要挑战。首先,数据高度不平衡。对于正在分析的机队,只有 182500 个输入点和 25 个输出点。在这种情况下建立纯粹的机器学习模型是非常困难的。
第二,虽然传统的基于物理的模型可能是准确的,但它们通常需要关于荷载条件的工程假设。考虑到这个问题的样本量包括 500 架飞机,这些模拟必须进行几百万次。
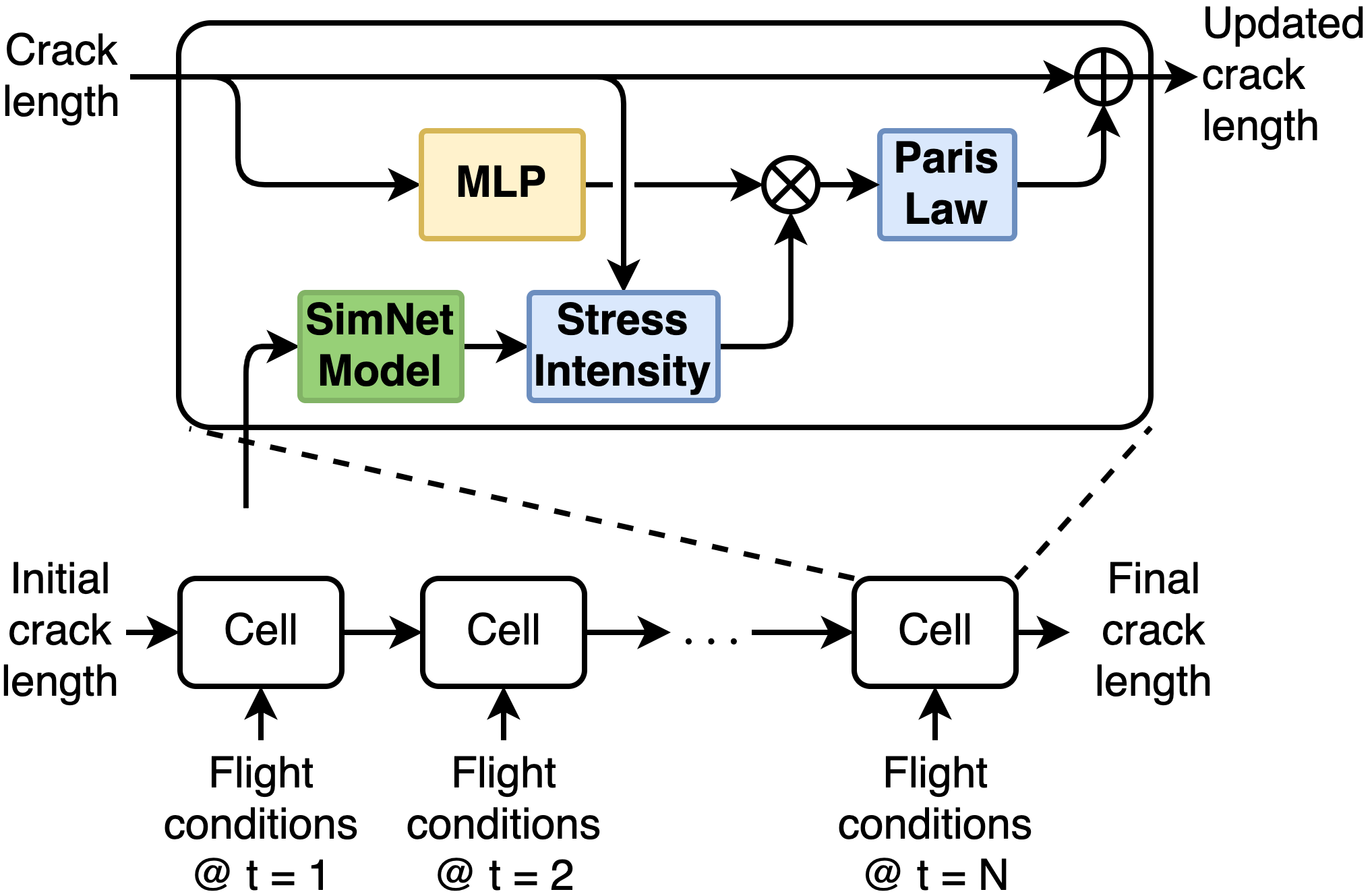
为了克服这些挑战, Viana 教授和他的团队开发了一种新的混合物理信息神经网络模型。图 3 显示了他们基于递归神经网络合并物理信息层和数据驱动层进行累积损伤累积的位置。
为裂纹扩展模拟配置的成熟有限元分析极其昂贵。因此,对于数字孪生应用来说,这根本是不可行的。即使我们多次对数百架飞机进行模拟,这也是正确的,因为我们优化了检查并决定如何为几架飞机交换航线。 SimNet 中构建了一个参数化物理驱动 AI 模型,该模型满足线性弹性的控制定律,如下所示:



Here,


与传统的数据驱动模型不同,这里不使用训练数据。相反,损失函数由线性弹性定律扩充,所需的二阶导数由自动微分计算。初始和边界条件也作为软约束施加,以完全指定物理系统。采用多种技术来提高模型的精度和收敛速度,如网络权值归一化、符号距离损失加权、微分方程归一化和无量纲化以及 XLA 核融合等。
经过一次训练后,该参数化模型提供了各种不同加载条件下循环应力的瞬时预测。这种瞬时预测在需要实时预测的数字孪生应用中至关重要。然而,传统的解算器一次只能解算一个配置。此外,数据驱动、基于代理的方法存在插值误差,并且预测可能不满足控制律。
对于这个经过训练的参数化模型,使用商业求解器验证了几个 SimNet 预测,结果表明,最大 Von Mises 应力的差异小于 5% ,这一点非常接近。该模型的培训在单个 V100 GPU 上进行。 SimNet 还为多 GPU 和多节点实现提供了可扩展的性能,并支持 TF32 以加速收敛。
在维亚纳教授的模型中,工程师和科学家可以使用物理信息层来模拟人们熟知的现象。该 MIG ht 包括机械应力计算,以估算具有巴黎定律疲劳增量块的损伤累积。另一个例子是,使用数据驱动层对特征不佳的零件进行建模,例如由于裂纹几何结构导致的应力强度修正。这就是混合模型可以帮助估算带有窗口切口的机身面板上的疲劳裂纹扩展的地方。
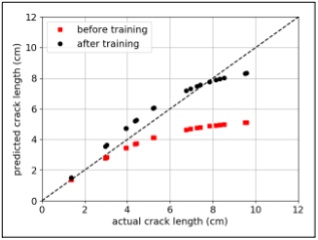
在图 4 中,“培训前”曲线使用纯物理模型。在循环应力计算中,使用线弹性,通过巴黎定律的数值积分获得:

:循环次数
and
:材料特性(通过试片试验获得)


在图 4 中,“训练后”曲线使用混合模型,其中 RNN 单元中的 MLP 层补偿缺失的物理(在不违反物理的情况下调整预测)。
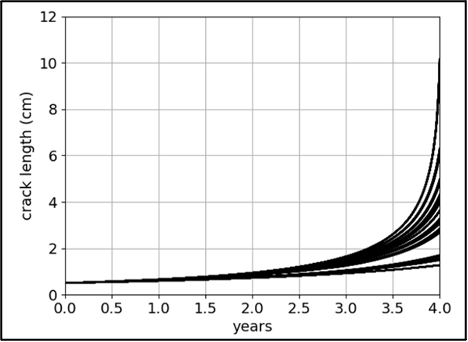
混合模型训练后,我们使用它预测整个机队 500 架飞机的裂纹长度历史。超过 3 . 5M 数据点的 500 压差时间序列量。混合累积损伤递归神经网络使用 SimNet 进行应力计算,预测 5 年内的裂纹长度历史。结果如图 5 所示。这使运营商能够优先考虑哪些飞机将被带去检查或更换不同航线结构的飞机。
运营商可以使用混合模型来分析整个车队。结果仪表板可以根据累积损伤率可视化最具攻击性的路线结构;处于高、中或低风险水平的飞机数量;以及哪些尾号在哪些桶中(图 6 )。
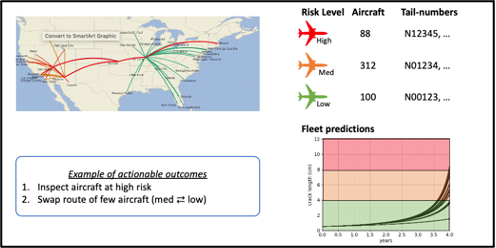
就可采取行动的结果而言,运营商可以使用混合模型来决定下一步应该带哪架飞机进行检查。他们可以在航线之间交换飞机,以便在进行检查时减轻损害积累。
该框架处理由少量输出观测数据和包含用作输入的时间序列的数据湖形成的高度不平衡的数据集。 GPU 计算可以放大数百架飞机的机队的计算,使训练时间不超过几个小时,推断时间不超过几秒。
Viana 教授的应用程序已在 TensorFlow v2 . 3 中实现,在各种 GPU NVIDIA 上使用 Python API 。根据应用程序和计算需要,您可以使用基于 GPU 的高性能集群、一个具有少量 GPU 的较小 Linux 服务器,甚至是 NVIDIA Jetson 。在本研究中,我们使用了一台 Linux 服务器,该服务器带有两个 Intel Xeon 处理器 E5-2683 和两个 NVIDIA P100 GPU s 。
下一步
在未来, Viana 教授和他的团队计划通过处理更复杂的应用,在加载和变形高度非线性且可能涉及多重物理的情况下,扩大 SimNet 在混合钉中累积损伤的使用。鉴于该方法的灵活性,他希望将其应用扩展到除民航和故障模式(如腐蚀和氧化)之外的其他行业。
维亚纳教授详细阐述了他的经历。“ SimNet 的精度与其他计算力学软件相当。但是,它的计算效率、快速周转时间以及与现有机器学习框架的轻松集成,使其成为我们为模拟需求选择的工具包。通过 SimNet ,我们将预测模型扩展到 500 架飞机的机队,并获得 predicti 在不到 10 秒的时间内完成模拟。如果我们要使用高保真有限元模型执行相同的计算,我们可能需要几天到一周的时间。作为一个研究机构,我们将 SimNet 视为未来的工具,它打开了可能性,使我们能够探索以前不可能的建模方法。”
有关更多信息,请参阅以下参考资料:
- 基于递归神经网络的累积损伤建模白皮书
- 用于数字孪生儿预后和健康管理的混合物理信息神经网络( GTC ‘ 21 届会议)
- 物理信息神经网络软件包 GitHub 回购
- Python 使用混合物理信息神经网络实现常微分方程解算器 GitHub 教程
要询问有关 Viana 教授工作的问题并了解其他人在使用 SimNet toolkit 做什么,请加入SimNet 论坛。有关 SimNet 功能的更多信息和下载 SimNet 工具包,请参阅 NVIDIA SimNet。