Posts by Yan Chang

边缘计算
2026年 1月 8日
使用 NVIDIA Isaac 和 GR00T N1.6 构建通用人形机器人能力
要让人形机器人真正有用,它们需要具备认知能力和移动操作能力,涵盖感知、规划以及在动态环境中的全身控制。 构建通用机器人需要一个统一的仿真、
2 MIN READ
模型/库/框架
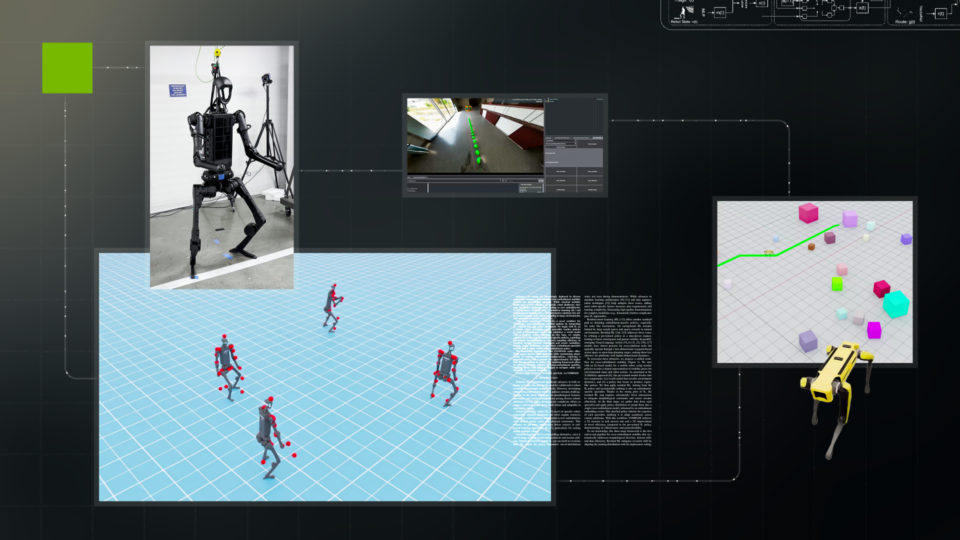
2025年 3月 27日
R²D²:利用 NVIDIA 研究中心的新型工作流和 AI 基础模型,提升机器人的移动和全身控制能力
欢迎阅读首期“NVIDIA 机器人研究与开发摘要(R²D²)”。
3 MIN READ

边缘计算
2024年 9月 23日
借助 ReMEmbR,生成式 AI 赋予机器人推理和行动能力
视觉语言模型 (VLM)通过将文本和图像投影到同一嵌入空间,将基础 LLM 的强大语言理解能力与 视觉 Transformer…
3 MIN READ