NVIDIA Isaac Sim
NVIDIA Isaac Sim™ 是一个基于 NVIDIA Omniverse™ 库构建的开源参考框架,用于在物理真实的虚拟环境中进行机器人仿真、测试和合成数据生成。
Isaac Sim 具有完全可扩展性,开发者可以基于 OpenUSD 构建自定义模拟器,或将其框架能力集成到现有测试与验证流水线中。
准备好开始体验了吗?
Isaac Sim 的工作原理
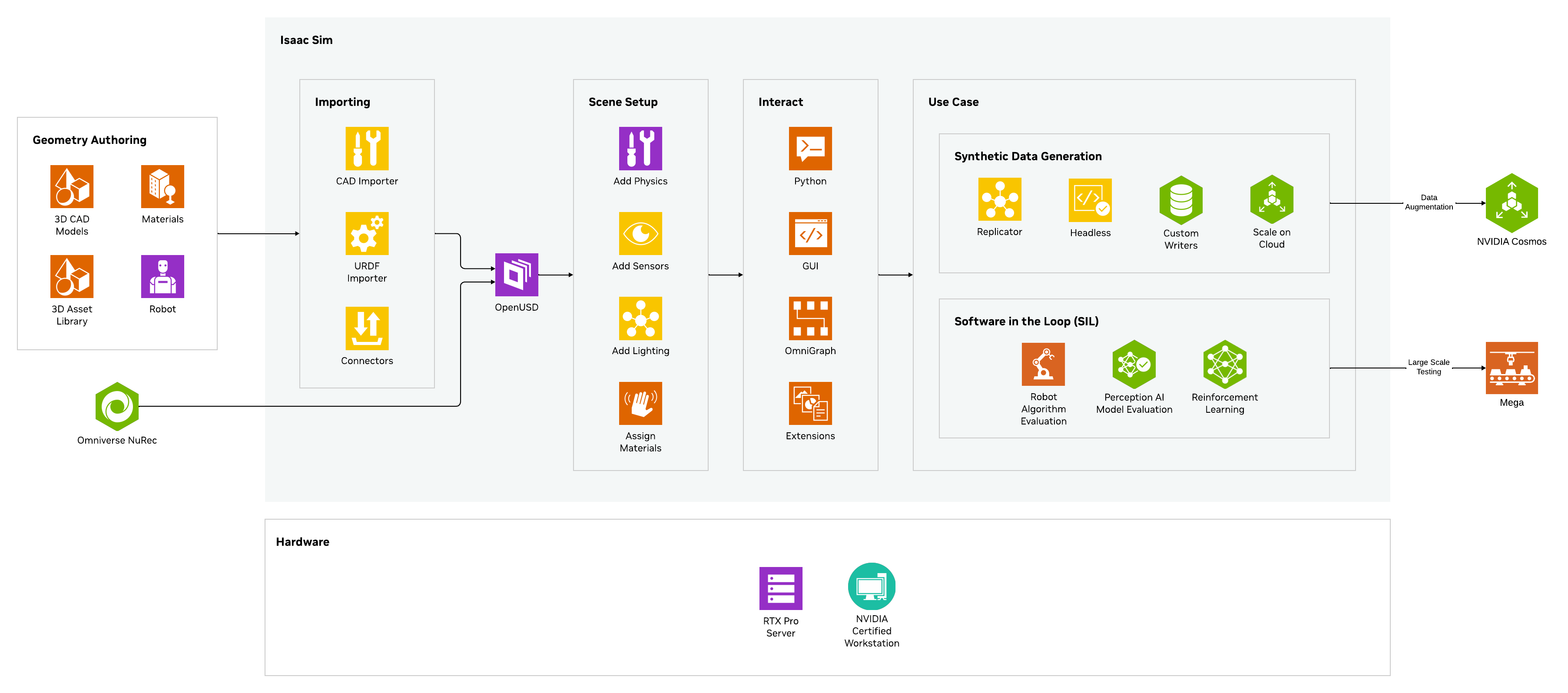
Isaac Sim 可以从多种数据源中摄取数据——例如计算机辅助设计 (CAD)、统一机器人描述格式 (URDF),或通过 NVIDIA Omniverse NuRec 和 Isaac TeleOp 捕获的真实世界场景——并将其转换为 USD。随后,开发者可以通过指定材质、启用物理属性以及配置机器人和传感器模型来搭建仿真场景,然后将这些机器人与 NVIDIA Isaac Lab 结合用于机器人学习,并在 Isaac Sim 中完成仿真。
Isaac Sim 还支持可控的合成数据生成,使开发者能够构建自定义数据工作流,以补充其现有数据源。这些数据可以通过 NVIDIA Cosmos™ 世界基础模型进一步增强。最后,开发者可以在仿真中训练感知和移动堆栈,并使用软件在环或硬件在环测试来评估 Isaac Sim 中的端到端系统。
开始使用 Isaac Sim



扩展 Isaac Sim 工作流
NVIDIA Cosmos
NVIDIA Cosmos是一个由最先进的生成式 AI 技术组成的平台世界基础模型以及一个视频处理工作流,该工作流旨在加速物理 AI系统。
开始使用 NVIDIA Cosmos

NVIDIA 物理 AI 数据集
NVIDIA 物理 AI 开放数据集由用于构建 NVIDIA 物理 AI 的经过验证的数据组成,开发者现可在 Hugging Face 上免费获取该数据集,从而突破数据瓶颈。
访问数据集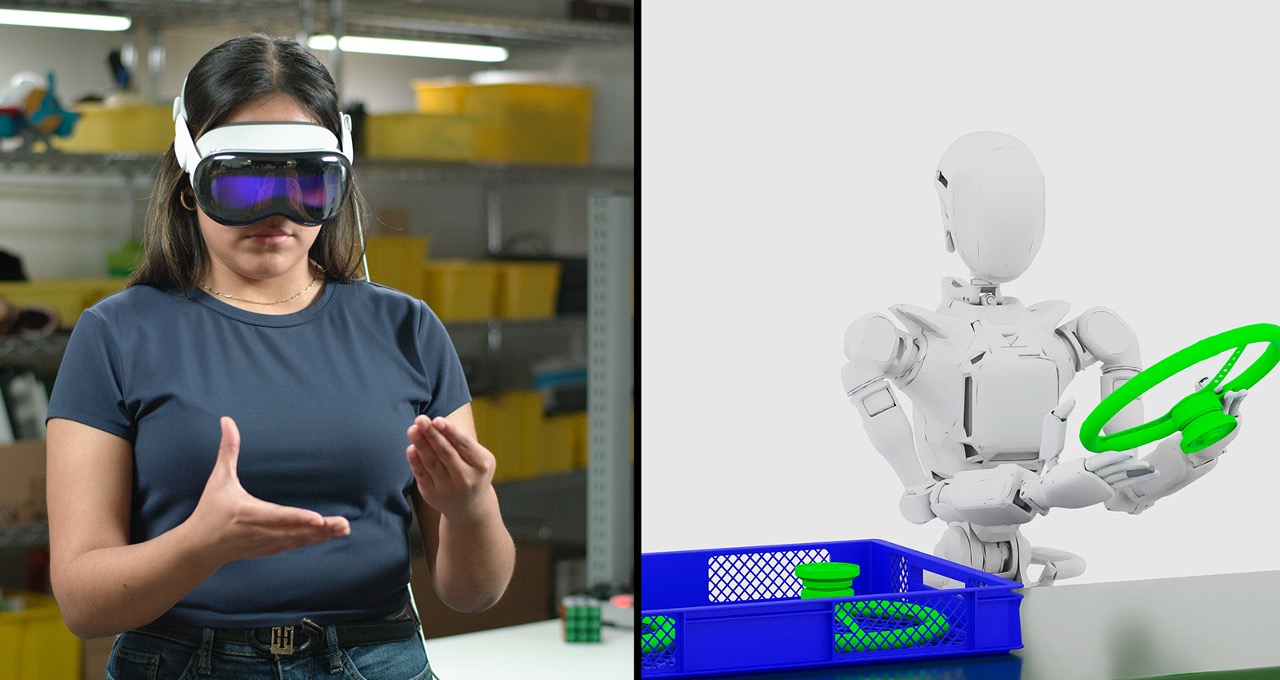
NVIDIA Isaac Teleop
借助 NVIDIA Isaac TeleOp,机器人开发者可以在现实世界中收集高质量的演示,并通过仿真来训练、测试和评估 NVIDIA Isaac Sim 和 Isaac Lab 中的机器人策略。
入门套件
使用 NVIDIA Omniverse NuRec 进行神经重建和渲染
将真实的传感器数据转化为交互式仿真使用 NuRec使用基于 3D Gaussian Splatting 的渲染来提高效率和准确性。
逼真的物理模拟
对作为物理 AI 基础的对象和系统的物理行为进行建模。
Isaac Sim 可以模拟刚体和车辆动力学、多关节关节、SDF 对撞机等,实现逼真的物理模拟
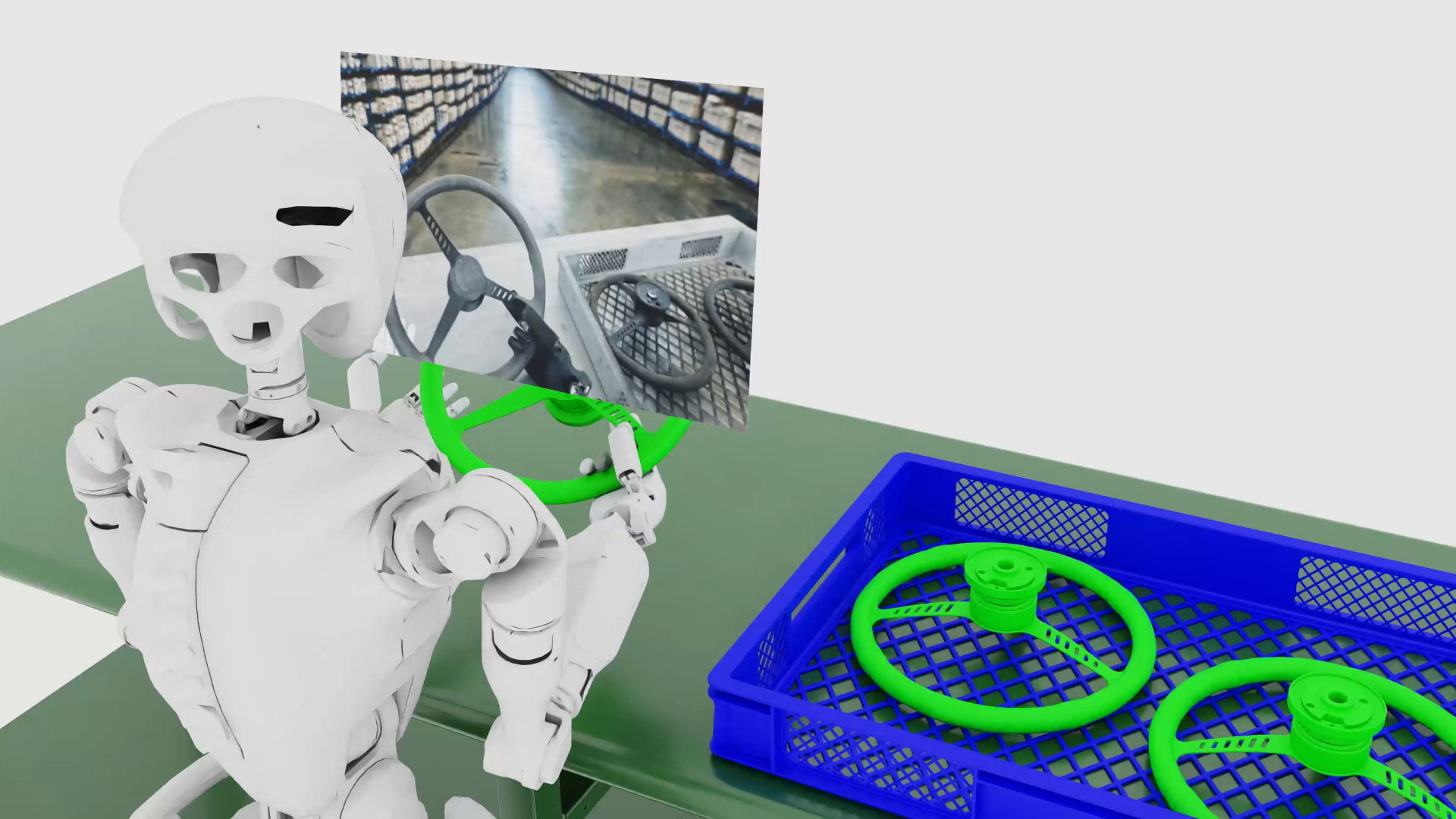
可扩展的合成数据生成
利用合成数据加速 AI 模型训练。
通过随机化照明、反射、颜色以及场景和素材位置等属性来生成训练数据。
机器人开发学习
使用 NVIDIA Isaac Lab 对机器人系统进行虚拟训练、测试和验证。
Newton,新一代开源物理模拟引擎
Newton 是一个开源、GPU 加速和可扩展的物理引擎,由 Google DeepMind 和 Disney Research 共同开发由 Linux 基金会管理。Newton 基于 NVIDIA Warp 和 OpenUSD 构建,针对机器人技术进行了优化,并与 MuJoCo Playground 或 NVIDIA Isaac Lab 等学习框架兼容。牛顿测试版现在可以使用。

Isaac Sim 学习库
近期机器人开发新闻
更多资源

常见问题
是的,Isaac Sim 可免费使用,根据 Apache 2.0 获得开源许可,并可在 GitHub 上获取。借助 Isaac Sim,您可以在 Isaac Sim 的NVIDIA Isaac Sim 附加软件和材料许可证。
是的,ISV 可以使用 Omniverse Kit 将 Isaac Sim 集成到其软件解决方案中。虽然 Isaac Sim 是开源的,可以免费分发,但分发 Omniverse Kit 需要获得 NVIDIA 的单独许可证,您可以通过 Omniverse Enterprise 订阅获得该许可证。本许可授予再分发、再许可和支持 Omniverse Kit 的权利,将其作为您产品中 Isaac Sim 的一部分。
您可以使用 OnShape、URDF、MJCF 和 ShapeNet 导入器以及通过 CAD 转换器导入 3D 机器人模型。请参阅文档了解更多详情。
是的,您可以使用 Isaac ROS/ ROS2 桥接器扩展程序将 Isaac Sim 连接到 ROS/ ROS2。请参阅文档了解更多详情。
是的,您可以在 Brev 上访问 Isaac Sim,它可以一键访问热门云平台上的 NVIDIA GPU 实例。您还可以将其下载为容器NGC并在您首选的云服务提供商 ( CSP) 上运行。
对于 AWS 用户,Isaac Sim 容器可在AWS 市场以便轻松部署。虽然 Isaac Sim 可以出于开发和研究目的免费部署在 AWS EC2 上,但您仍然需要支付任何与 AWS EC2 相关的服务费。
Isaac Lab 是一款基于 Isaac Sim 平台构建的开源轻量级参考应用,专门针对大规模机器人学习进行了优化。详细了解 Isaac Lab单击此处。
标记器包括 RGB、边界框、实例分割、语义分割等。
标注数据可以在COCO 和 KITTI 格式。
Isaac Sim 可以轻松扩展到多个 GPU,以加快模拟速度。了解详情单击此处。