NVIDIA Isaac Lab
NVIDIA Isaac™ Lab 是一个开源、GPU 加速、面向智能体的机器人学习仿真框架,专为大规模训练机器人策略而设计。
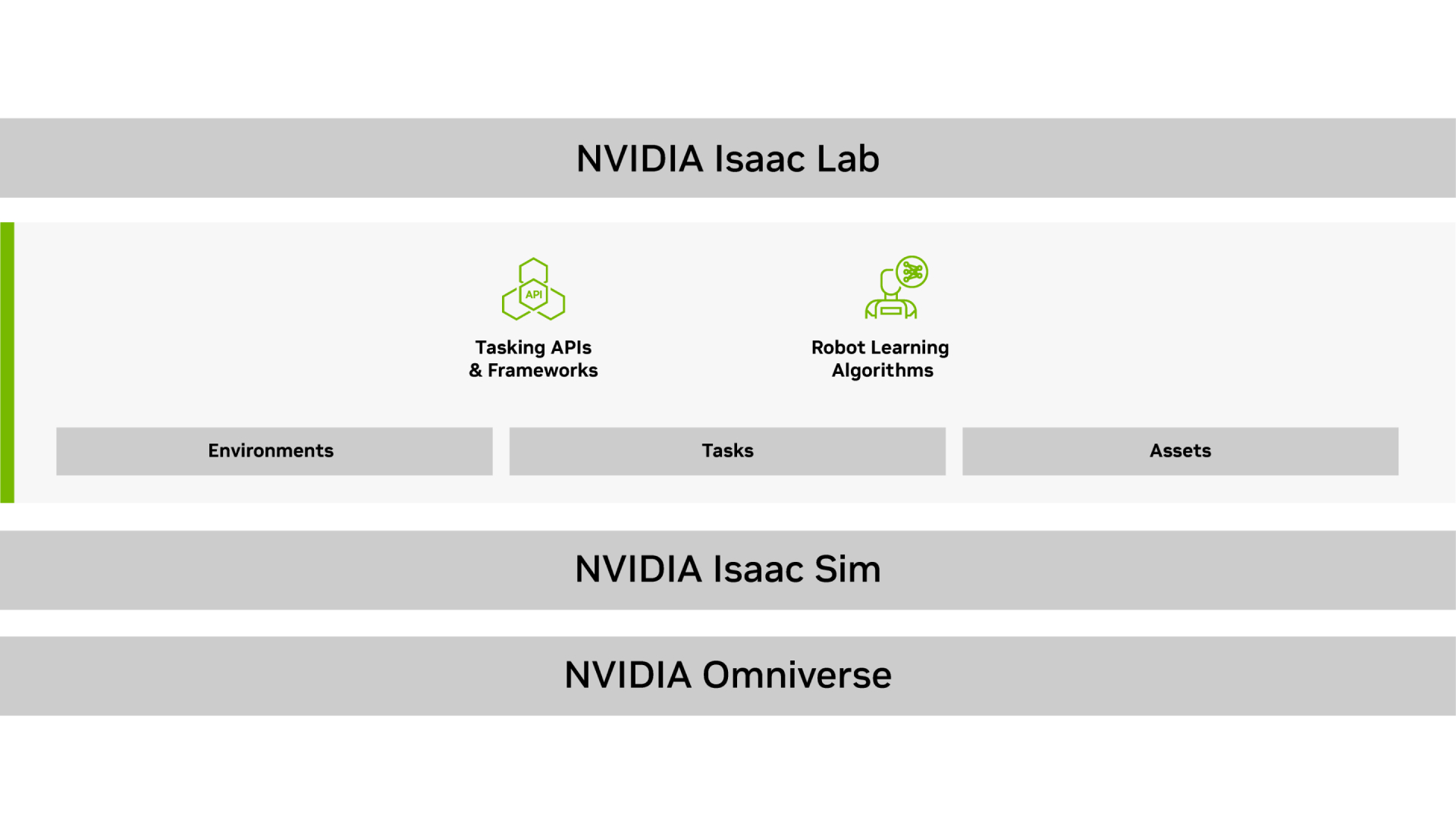
它支持在多个物理引擎、渲染器和学习算法之间灵活集成,包括 Newton 和 NVIDIA Omniverse™ 库。这有助于加速从桌面到云端的真实机器人应用中与视觉和感知相关的训练。
Isaac Lab 的工作原理
Isaac Lab 的模块化架构以及基于 NVIDIA GPU 的并行加速,使其非常适合用于构建覆盖多种机体形态的机器人策略,包括人形机器人、机械臂和自主移动机器人(AMR)。
这为你提供了一个完整的机器人学习框架,涵盖从环境搭建到策略训练的全流程。它同时支持模仿学习和强化学习方法。此外,你可以通过集成多种物理引擎(如 Newton、NVIDIA® PhysX®、NVIDIA Warp 和 MuJoCo)进一步定制和扩展 Isaac Lab 的能力。
Isaac Lab 也是 NVIDIA Isaac GR00T 平台的基础机器人学习框架。
入门资源
主要特性
灵活的机器人学习
利用机器人训练环境、任务、学习技术以及集成自定义库 (例如 skrl、RLLib、rl_games 等) 的能力,自定义工作流程。
缩小仿真与现实之间的差距
使用 Newton、PhysX 或任何物理引擎,使用高保真物理特性训练策略,为更多任务实现更强大的接触建模和更逼真的交互。

随时随地扩展训练
借助基于 Warp 和 NVIDIA® CUDA® 可图形环境构建的 GPU 优化仿真路径,运行快速的大规模训练,并通过独立的无外设操作从工作站到数据中心轻松部署。
Isaac Lab 入门

入门套件
查看更多教程和操作指南文档。
加速机器人学习
从强化学习和模仿学习中进行选择,以训练 AI 机器人。轻松引入自定义库,并使用直接的智能体环境或层次管理器开发工作流。
通过多 GPU 和多节点训练进行扩展
针对跨多个 GPU 和节点的复杂强化学习环境,扩展跨具身模型的训练。通过与 NVIDIA OSMO 集成,在本地和云端 ( AWS、GCP、Azure 和阿里云) 进行部署。
在 Omniverse 中进行准确的高保真物理模拟和渲染
通过 Isaac Lab 利用最新的 GPU 加速 PhysX 版本,包括对可变形对象的支持,确保通过域随机化增强快速准确的物理模拟。
Isaac Lab 学习库
生态系统
我们的行业合作伙伴和协作者正在将 NVIDIA Isaac Lab 和加速计算集成到他们的平台和解决方案中。
更多资源

最新 Isaac Lab 新闻
立即开始使用 NVIDIA Isaac Lab。
常见问题解答
Isaac Lab 框架在BSD-3 条款许可证。
Isaac Sim™ 是一个基于 NVIDIA Omniverse 构建的综合性机器人仿真平台,可通过高级物理特性和逼真渲染提供高保真仿真。它专注于合成数据生成 (SDG) 以及测试和验证 (SIL/ HIL) ,是定制机器人模拟器的参考模板。
相比之下,Isaac Lab 是一个基于 Isaac Sim 构建的轻量级开源框架,专门针对机器人学习工作流进行了优化,旨在简化机器人研究中的常见任务,如强化学习、模仿学习和运动规划。
如果您是 NVIDIA Isaac Gym ( Isaac Lab 的前身) 的现有用户,我们建议您迁移到 Isaac Lab,以确保您能够获得机器人学习方面的最新进展和强大的开发环境,从而加速机器人训练工作。查看迁移指南从 Isaac Gym 环境到 Isaac Lab。
是的,Isaac Lab 和 MuJoCo 是互补的。MuJoCo 的易用性和轻量级设计允许快速原型设计和策略部署,当您想要创建更复杂的场景、使用 GPU 扩展大规模并行环境以及使用 RTX 渲染进行高保真传感器仿真时,Isaac Lab 可以补充它。NVIDIA 和 MuJoCo 正在积极探索推进技术合作,敬请关注未来的公告。