NVIDIA Isaac GR00T
通用机器人 00 技术
NVIDIA Isaac™ GR00T 是一个面向通用用途人形机器人的开放参考平台,使开发者能够更高效地构建、训练、测试和部署由 AI 驱动的机器人。
它由开放数据和数据管道、开放的机器人基础模型、仿真框架、中间件、CUDA-X 加速运行时库,以及用于实时机器人推理和控制的 NVIDIA Jetson Thor 组成。
了解 Isaac GR00T 的实际应用
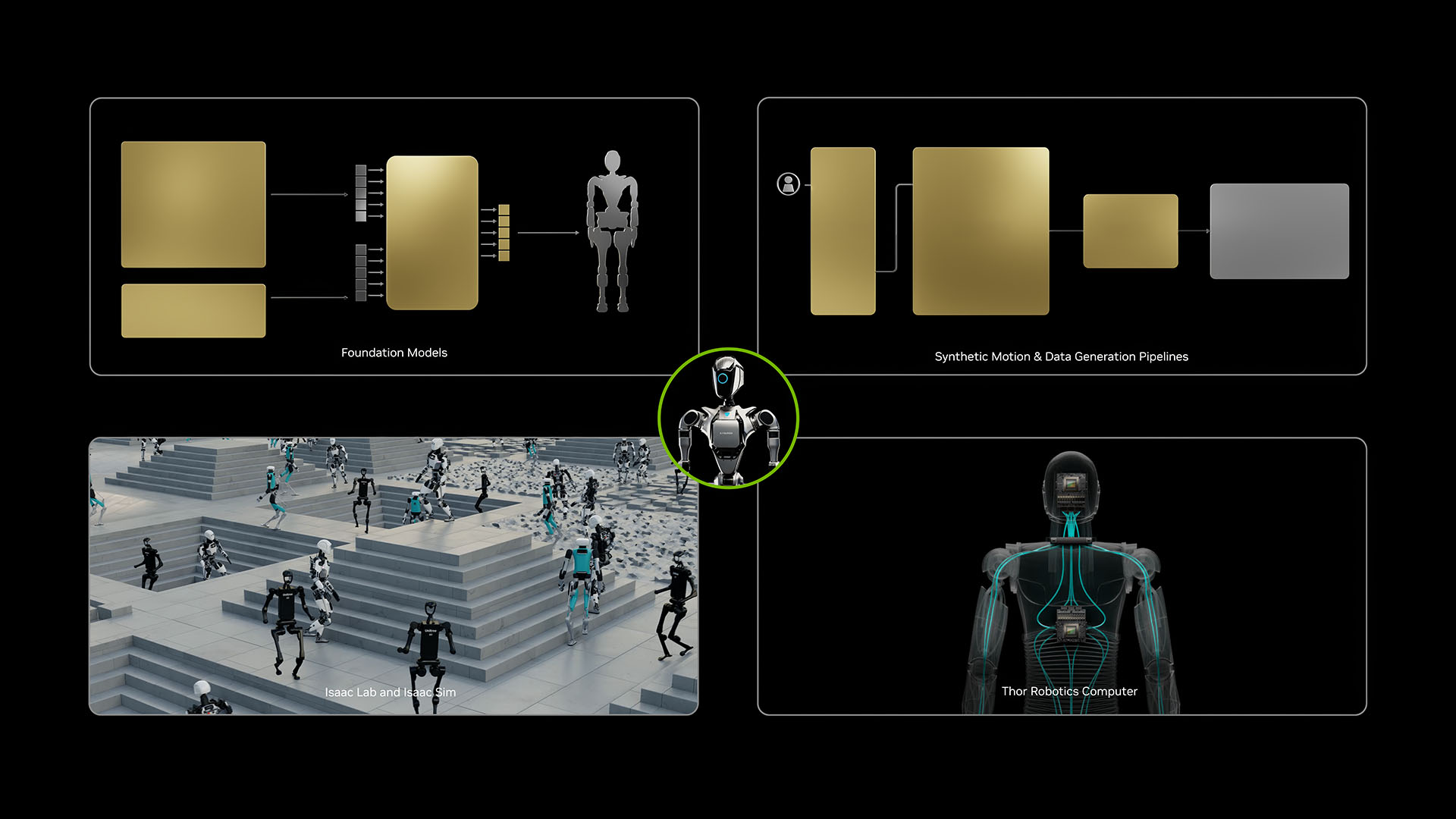
Isaac GR00T 的工作原理
Isaac GR00T 包含开放数据和数据管道、开放的机器人基础模型、基于 NVIDIA Omniverse™ 和 Cosmos™ 构建的仿真框架、中间件、NVIDIA® CUDA-X™ 加速运行时库,以及用于实时机器人推理和控制的 NVIDIA Jetson Thor™。
简介视频
观看 Isaac GR00T 如何为 AI 机器人的未来提供奠定基础。
入门博客
探索全球首个用于通用人形机器人推理和技能的开源基础模型。
使用 Isaac GR00T‑Dreams 训练类人机器人
观看 GR00T‑Dreams 和 Isaac GR00T 如何让机器人学习新任务并具备跨环境泛化能力。
开发者教程
了解如何对 Isaac GR00T N1.5 进行后训练,仅需 20 至 40 次示范即可完成机器人训练。
Isaac GR00T N 机器人基础模型
Isaac GR00T 开放基础模型非常适合通用人形机器人的推理与技能学习。这一跨形态(cross-embodiment)解决方案可接收多模态输入(包括语言和图像),以在多样化环境中执行操作任务。
这些模型基于大规模人形机器人数据集进行训练,数据来源包括真实采集数据、合成数据以及互联网规模的视频数据。同时,它们还可以通过后训练针对特定形态、任务和环境进行适配。
Isaac GR00T 模型能够在常见任务之间实现良好的泛化能力——例如抓取、使用单臂或双臂移动物体,以及在双臂之间转移物品——也可以执行需要长上下文和多种通用技能组合的多步骤任务。这些能力可应用于多种使用场景,包括物料搬运、包装和检测等。

Isaac GR00T 1.7
从 Hugging Face 下载Isaac GR00T 工作流
探索用于加速人形机器人先进功能开发的强大工具,并弥合仿真与现实之间的差距。

开始人形机器人开发
获取所需的软件和基础架构,借助 GR00T 基础技术推动人形机器人的开发。
软件和服务
计算基础设施
仿真
NVIDIA Omniverse 和 Cosmos 系统在业界领先的 NVIDIA RTX™ PRO 6000 Blackwell 工作站和服务器 GPU 上提供仿真平台。这让您能够加速新一代机器人仿真和学习工作负载。
部署
加速先进人形机器人的开发,并运行多模态 AI 模型。Jetson AGX Thor 基于 NVIDIA Blackwell 架构,并配备集成功能安全、高性能 CPU 和 100 GB 以太网带宽。
人形机器人开发者学习资源库
人形机器人生态系统
NVIDIA 构建基础模型、加速库和蓝图,加速全球人形机器人开发者生态系统。









更多资源
常见问题解答
GR00T 模型接收三种多模态输入:(1)来自机载摄像头的视频序列;(2)自然语言指令;(3)机器人当前的本体感觉状态(关节位置)。
模型输出动作片段——也就是关节相对运动的预测序列。通过预测未来多个时间步的动作,模型能够实现平滑的全身控制,从而支持稳定的移动以及协调的双臂操作。
GR00T 模型利用了大规模混合数据源:用于世界知识学习的互联网规模人体视频、用于物理对齐的真实遥操作数据,以及为安全扩展学习而生成的合成数据。
这种多样化的数据使模型能够在不同硬件平台上具备很强的泛化能力。例如,GR00T N1.6 的训练集扩展了机体覆盖范围,将 Unitree G1、AgiBot Genie-1 和 Fourier GR-1 纳入其中,并结合了专门的双臂操作数据集(YAM)。
可以通过使用少量录制的任务演示对 GR00T 模型进行微调,将其适配到新的硬件平台上。这个高效的过程使系统在保持预训练阶段所获得的通用能力的同时,学习特定机器人的运动模式。
Isaac GR00T 1.7 早期体验版让开发者能够在正式商用发布之前,提前开始对模型进行试验并将其集成到自身工作流程中。开发者可以下载该模型、探索代码库,并基于 NVIDIA Isaac GR00T 技术栈开始构建原型或开展研究。
早期体验版支持的内容
-
访问已预训练的 GR00T 1.7 模型权重和参考代码。
使用自定义机器人数据或演示,对模型进行微调或执行推理。
用于实验、原型开发和科研等场景。
不支持的内容
具备商业支持的生产级部署。
功能集稳定且性能经过全面验证的版本。.
来自 NVIDIA 的产品级支持。