NVIDIA Isaac Sim
NVIDIA Isaac Sim™ 是一款基于 NVIDIA Omniverse 构建的开源参考应用,使开发者能够在基于物理的虚拟环境中模拟和测试 AI 驱动的机器人开发解决方案。
Isaac Sim 基于 NVIDIA Omniverse 构建,完全可扩展。这意味着您可以构建自己的基于通用场景描述 (OpenUSD) 的自定义模拟器,或将核心 Isaac Sim 技术集成到现有的测试和验证流程中。
准备好开始使用了吗?Isaac Sim 5.0 现已在 GitHub 开放获取,开发者可通过克隆仓库源码方式在本地构建、使用最新特性。此外,还可通过 NVIDIA Brev 云服务,直接获取主流云厂商上的 NVIDIA GPU 实例,无需本地配置即可快速启动、部署和迭代 Isaac Sim 仿真环境,加速机器人 AI 研发流程。
Isaac Sim 的工作原理
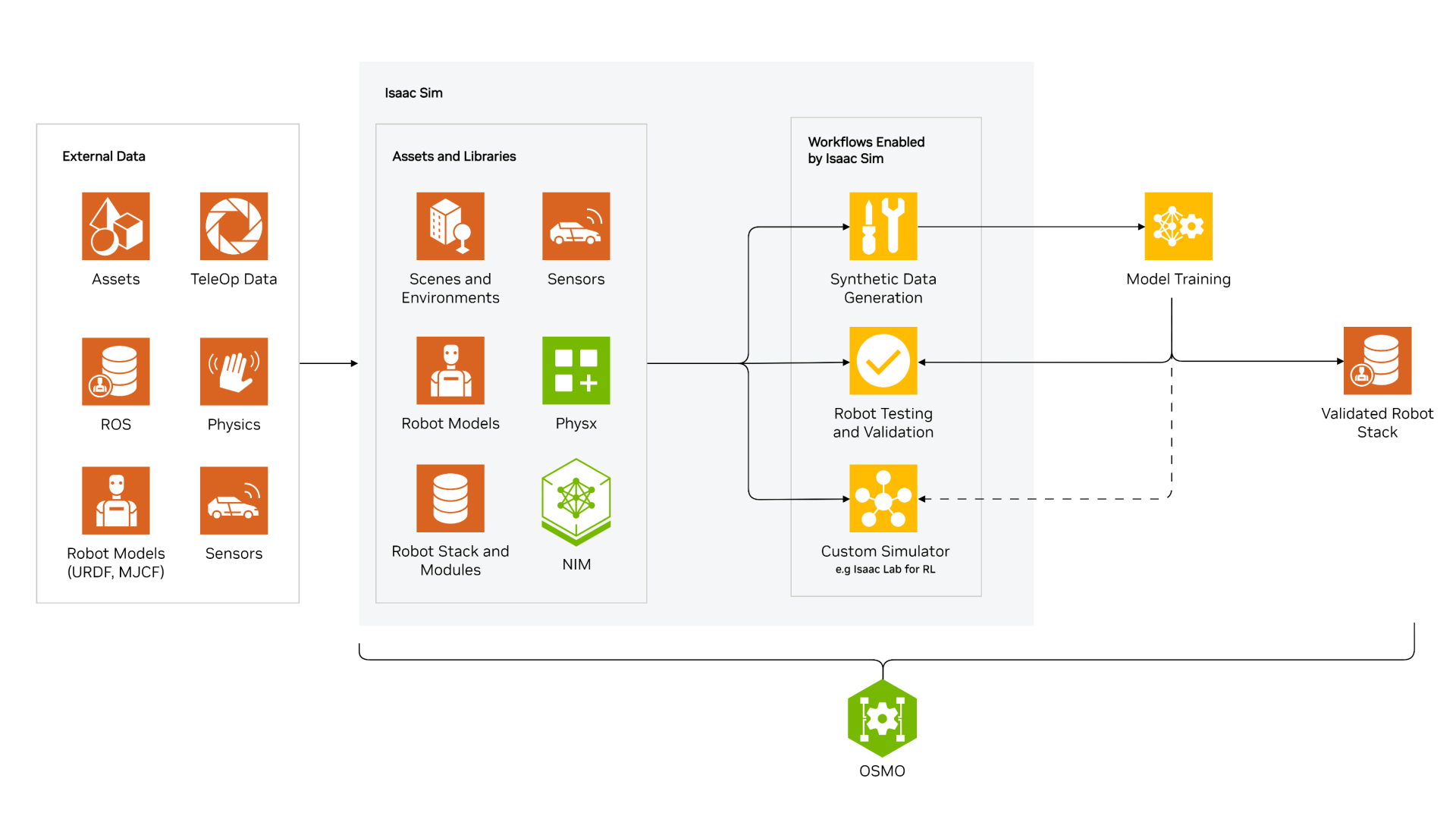
Isaac Sim 促进了三个基本工作流程:生成用于训练感知模型的合成数据、为完整的机器人堆栈执行软件在环测试,以及通过 Isaac 实验室实现机器人学习。Isaac Sim 支持大规模合成数据生成,包括感知、移动性、基于物理的抓取、动作、事件等,并提供写实渲染和自动生成真实标签,用于训练和微调机器人基础模型。此外,Isaac Sim 可通过与真实机器人软件集成,实现软件在环(software-in-the-loop)测试,从而验证机器人控制与感知系统。Isaac™ Lab 还支持机器人学习流程,加速仿真中的训练,助力模型在现实场景快速部署。
主要特性
预填充机器人和 SimReady 资产
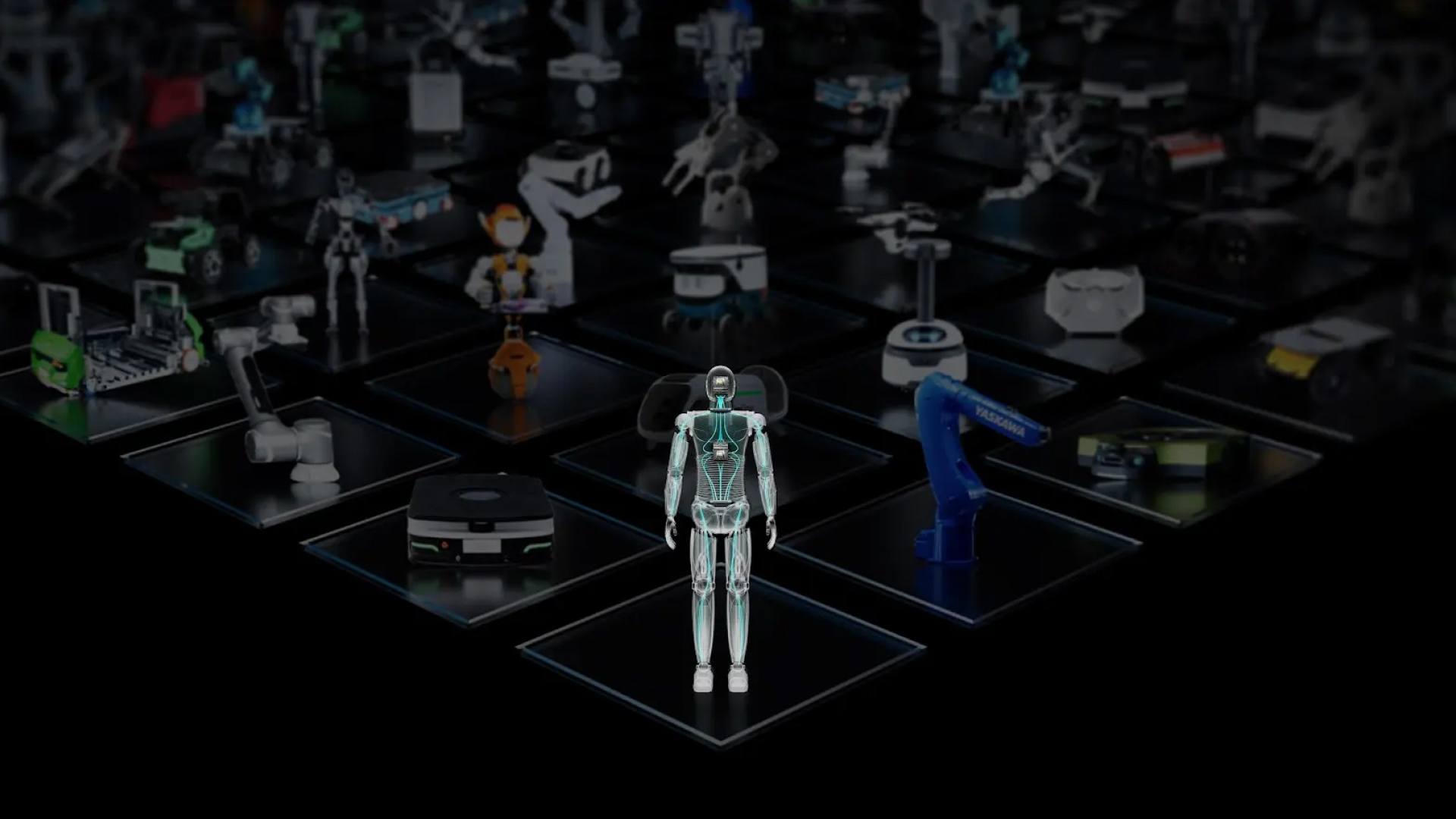
Isaac Sim 支持多种差动底盘、形态和功能的机器人,这些机器人基于 OpenUSD 构建,具备理想的物理属性,可加速机器人仿真流程。
- 人形机器人:1 倍敏捷性、里叶智能和 Sanctuary
- 操作工具:Fanuc、KUKA、Universal Robots 和 Techman
- 四足机器人:ANYbotics、Boston Dynamics 和 Unitree
- AMR:idealworks、iRobot
访问量超过 1000 SimReady 3D 素材包括传送带、箱子和托盘,用于构建仿真场景。Isaac Sim 现已支持机器人及传感器 schema,更便捷地定义元数据。NVIDIA Omniverse NuRec 神经渲染功能进一步提升写实度,可将传感器捕获的数据转换为可交互的仿真内容..
引导式 AI 模型开发
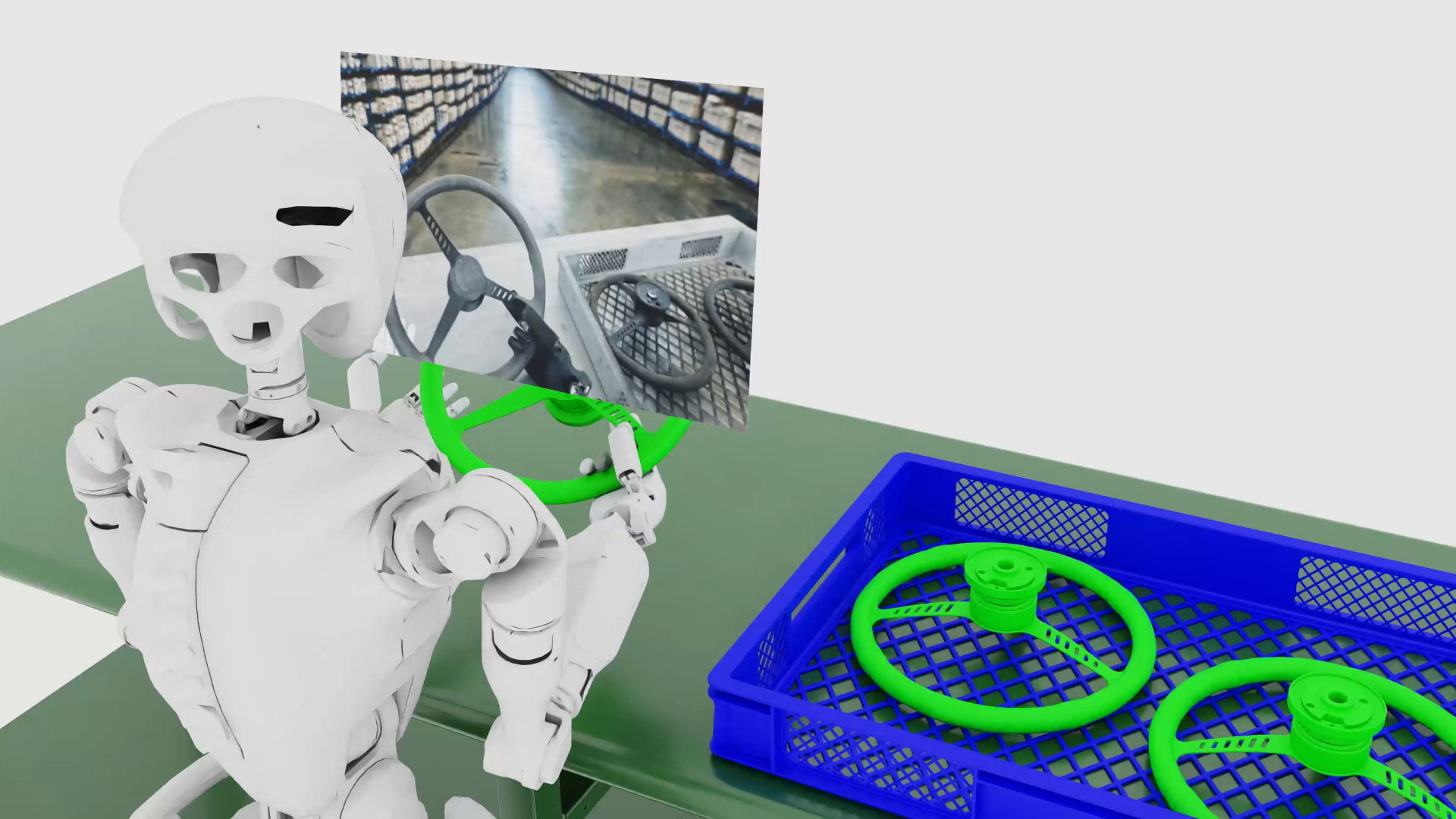
在数据有限或受限的情况下,可利用合成数据生成(synthetic data generation)来启动 AI 模型训练。开发者还可以将这些数据与 Cosmos World Foundation Models 结合,并对 Vision Language Action Models(如 GR00T N1.5)进行后期训练。
可扩展测试和验证
测试在各种条件和配置下在复杂多变的环境中运行的单个机器人或整个机器人群。
适用于机器人工作流的模块化架构
可创建自定义工作流程,或与现有流程集成,以支持包括人形机器人、机械臂和自主移动机器人(AMR)在内的多种类型机器人。
逼真的物理模拟
可通过 NVIDIA PhysX® 获取物理能力,包括关节摩擦、驱动、刚体与软体动力学、速度等多项功能。
开始使用 Isaac Sim



加速机器人开发工作流程
NVIDIA Cosmos™
NVIDIA Cosmos 是一个由先进的生成式 AI 平台组成的平台世界基础模型先进的标记器、护栏和加速视频处理管线,旨在加速物理 AI自动驾驶汽车和机器人等系统。
开始使用 NVIDIA Cosmos

NVIDIA Physical AI Dataset
通过 NVIDIA Physical AI Dataset(开放源代码数据集,由已验证的数据组成,用于构建 NVIDIA 物理 AI),开发者可在 Hugging Face 免费获取数据,突破数据瓶颈,加速物理智能相关研发。
入门套件
神经重建与渲染结合 NVIDIA Omniverse NuRec
可利用基于 3D 高斯体素(Gaussian Splatting)的渲染技术,将真实世界传感器数据高效、精准地转换为可交互仿真环境。
逼真的物理模拟
对物理 AI 的基础对象和系统的物理行为进行建模。
Isaac Sim 可以模拟刚体和车辆动力学、多关节关节连接、SDF 碰撞体等,以实现逼真的物理模拟
可扩展的合成数据生成
利用合成数据引导 AI 模型训练。
通过随机化照明、反射、颜色以及场景和素材位置等属性来生成训练数据。
机器人开发仿真
使用 NVIDIA Isaac Sim 和 NVIDIA Isaac Lab 虚拟训练、测试和验证机器人系统。
加速医疗领域 AI 机器人研发
NVIDIA Isaac for Healthcare 是专为加速支持 AI 的医疗机器人仿真、训练与部署而打造的平台。它将强大的 NVIDIA 三计算机架构引入医疗机器人领域,统一从仿真到实时执行的完整开发栈。

Isaac Sim 学习资料库
近期机器人开发新闻
更多资源

常见问题解答
Isaac Sim Github 仓库可免费使用,并遵循 Apache 2.0 许可协议。然而,如果你希望基于 Isaac Sim 开发并分发任何应用,则需获得 Omniverse Enterprise 授权许可。你可以在此处查看完整的 Omniverse 条款和许可信息。
您可以使用 OnShape、URDF、MJCF 和 ShapeNet 导入器并通过 CAD 转换器导入 3D 机器人模型。请参阅文档了解更多详情。
是的,您可以使用 Isaac ROS/ROS2 桥接器扩展程序将 Isaac Sim 连接到 ROS/ROS2、请参阅文档了解更多详情。
是的,您可以从以下位置访问 Isaac Sim 容器 NGC 并在首选 CSP (云服务提供商) 上运行。
对于 AWS 用户,Isaac Sim 容器可在AWS 市场以便轻松部署。虽然 Isaac Sim 可出于开发和研究目的免费部署在 AWS EC2 上,但您仍需支付任何与 AWS EC2 相关的服务费。
Isaac Lab 是基于 Isaac Sim 平台构建的开源轻量级参考应用,专为大规模机器人学习进行优化。可在此处了解更多关于 Isaac Lab 的信息。
OSMO是一个云原生编排平台,用于跨本地、私有云和公有云扩展复杂的多阶段和多容器+机器人工作负载。它现在可供机器人开发者和
NVIDIA人形机器人开发者计划免费托管服务。
注释器包括 RGB、边界框、实例分割、语义分割等。
标注数据可以在COCO 和 KITTI 格式。
Isaac Sim 可轻松扩展到多个 GPU,从而加快模拟速度。了解详情单击此处。